
A technológia fejlődésének egyik alappillére, egy olyan mélyen gyökerező elv, amely nélkül a modern világ számos vívmánya elképzelhetetlen lenne: a negatív visszacsatolás. Ez a láthatatlan, mégis mindent átható mechanizmus biztosítja a stabilitást, a pontosságot és a megbízhatóságot rendszerek milliárdjaiban, az egyszerű háztartási eszközöktől kezdve a komplex ipari vezérlőrendszereken át az emberi test fiziológiai folyamataiig. Lényegében arról van szó, hogy egy rendszer kimenetét visszavezetjük a bemenetére, de oly módon, hogy az a bemeneti jelet gyengítse vagy ellensúlyozza, ezáltal stabilizálva a rendszert egy kívánt állapot körül.
A visszacsatolás fogalma nem újkeletű; már az ókori Görögországban is alkalmaztak olyan vízórákat, amelyek valamilyen szinten szabályozták a víz áramlását. A modern értelemben vett negatív visszacsatolás elméleti alapjai azonban a 20. században, különösen a távközlési és elektronikai mérnöki területeken, mint például a Bell Labs-nél dolgozó Harold S. Black nevéhez fűződnek, aki az 1920-as években forradalmi megoldást talált az erősítők linearitásának és stabilitásának javítására. Azóta a koncepció áthatotta a mérnöki tudomány szinte minden ágát, és ma már a legtöbb automatizált rendszer alapját képezi.
Ez a cikk mélyrehatóan tárgyalja a negatív visszacsatolás működési elvét, matematikai alapjait, főbb jellemzőit és számtalan alkalmazását a legkülönfélébb területeken. Célunk, hogy bemutassuk, miért ez a mechanizmus a modern technológia egyik legfontosabb sarokköve, és hogyan járul hozzá mindennapi életünk kényelméhez és biztonságához.
A negatív visszacsatolás alapvető működési elve
A negatív visszacsatolás alapvető célja egy rendszer kimeneti értékének egy előre meghatározott, kívánt érték közelében tartása, függetlenül a külső zavaró tényezőktől vagy a rendszer belső változásaitól. Ezt egy zárt hurkú rendszer (closed-loop system) segítségével éri el, ahol a kimenet folyamatosan monitorozva van, és az eltérés a kívánt értéktől visszahat a rendszer bemenetére, korrekciós intézkedéseket kiváltva.
Képzeljünk el egy egyszerű példát: egy termosztát által szabályozott fűtési rendszert. A kívánt hőmérsékletet beállítjuk (ez a referenciajel), a termosztát méri a szoba aktuális hőmérsékletét (ez a kimeneti jel). Ha a mért hőmérséklet alacsonyabb, mint a beállított, a rendszer „hibát” észlel. Ez a hiba aktiválja a fűtést (a beavatkozó egységet), ami melegíti a szobát. Amint a hőmérséklet eléri vagy meghaladja a beállított értéket, a termosztát lekapcsolja a fűtést. Ez a folyamat addig ismétlődik, amíg a hőmérséklet a kívánt tartományban marad. Ez egy klasszikus példája a negatív visszacsatolásnak.
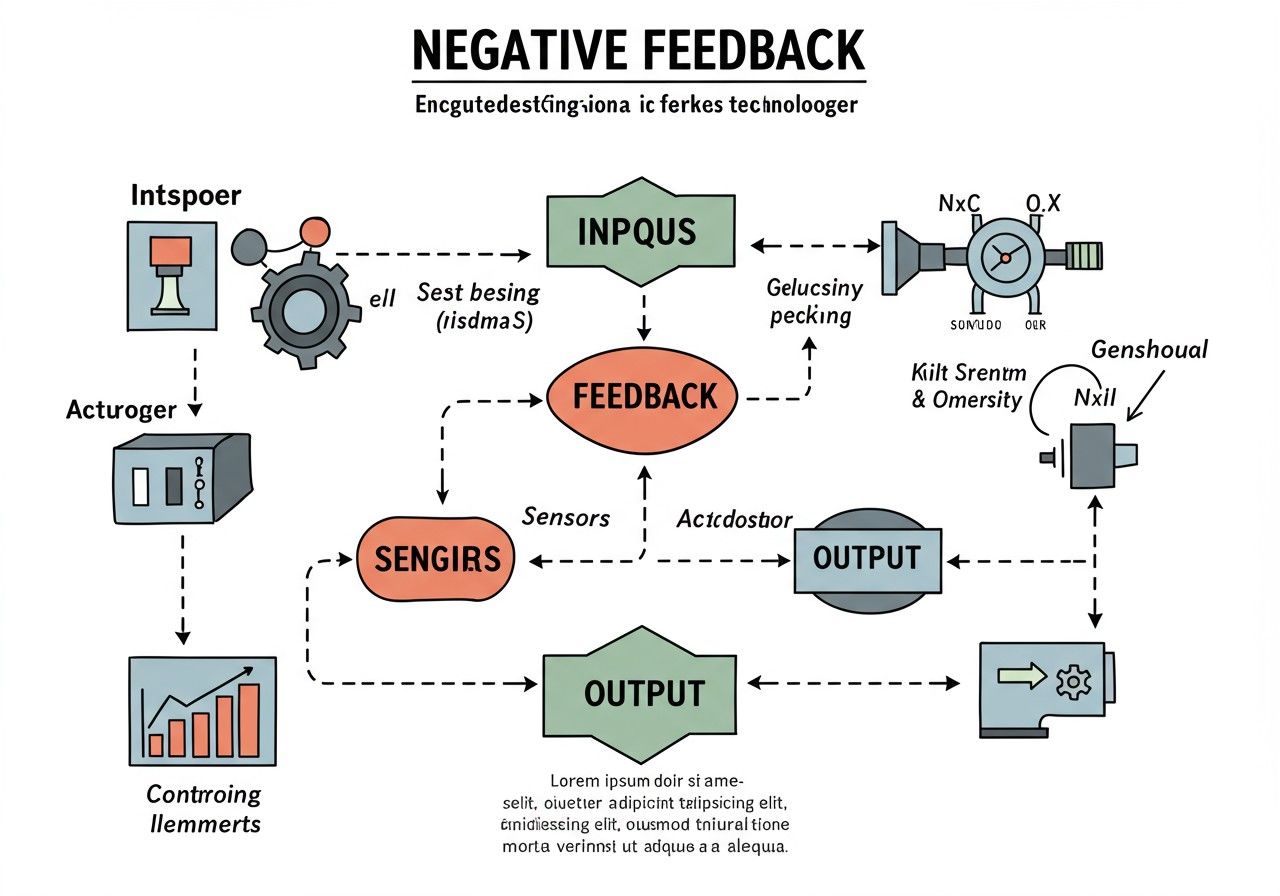
A zárt hurkú rendszer komponensei
Egy tipikus negatív visszacsatolású rendszer a következő alapvető komponensekből épül fel:
- Referenciajel (Set Point, Kívánt Érték): Ez az az ideális kimeneti érték, amelyet a rendszernek tartania kell. Ezt mi állítjuk be, vagy egy másik rendszer generálja.
- Érzékelő (Sensor): Feladata a rendszer aktuális kimeneti értékének mérése. Fontos, hogy pontos és megbízható legyen, hiszen az egész szabályozás ezen az információn alapul. Például egy hőmérséklet-érzékelő, egy nyomásmérő, egy feszültségmérő.
- Összehasonlító (Comparator): Ez az egység veszi a referenciajelet és az érzékelő által mért kimeneti jelet, majd kiszámítja a kettő közötti különbséget. Ez a különbség a hiba jel (error signal).
- Szabályozó (Controller): A hiba jel alapján dönt arról, hogy milyen korrekciós lépéseket kell tenni. Ez az egység a rendszer „agya”, amely algoritmusok vagy logikai szabályok alapján generálja a beavatkozó jelet. A PID szabályozó (Proportional-Integral-Derivative) az egyik leggyakoribb típus.
- Beavatkozó (Actuator): Ez az egység hajtja végre a szabályozó által elrendelt fizikai beavatkozást a rendszeren. Például egy fűtőelem, egy szelep, egy motor.
- Szabályozott szakasz (Plant/Process): Ez maga a rendszer, amelynek a kimenetét szabályozni szeretnénk. Például egy szoba fűtési rendszere, egy vegyi reaktor, egy robotkar.
A hurok zártsága azt jelenti, hogy a kimenet folyamatosan hatással van a bemenetre, egy állandóan korrigáló körforgást hozva létre. A „negatív” jelző arra utal, hogy a visszacsatolt jel ellenkező irányú, mint a hiba, azaz csökkenteni igyekszik azt.
Miért elengedhetetlen a negatív visszacsatolás? A kulcsfontosságú előnyök
A negatív visszacsatolás széleskörű elterjedtsége nem véletlen; számos olyan előnnyel jár, amelyek nélkül a modern technológiai rendszerek nem lennének képesek a mai szintű teljesítményre és megbízhatóságra. Ezek az előnyök teszik a visszacsatolt szabályozást a mérnöki tervezés egyik alapvető paradigmájává.
1. Stabilitás
Talán a legfontosabb előny a stabilitás biztosítása. Egy nyílt hurkú rendszer (open-loop system) – ahol nincs visszacsatolás – hajlamos lehet a külső zavarokra vagy belső paraméterváltozásokra túlérzékenyen reagálni, ami kiszámíthatatlan viselkedéshez, sőt akár a rendszer összeomlásához is vezethet. A negatív visszacsatolás folyamatosan figyeli a kimenetet és korrigálja az eltéréseket, ezáltal stabilizálva a rendszert egy kívánt működési pont körül. Ez különösen kritikus olyan rendszerekben, ahol a pontosság és a megbízhatóság létfontosságú, mint például az orvosi eszközök vagy a repülőgépek vezérlőrendszerei.
A negatív visszacsatolás a mérnöki stabilitás sarokköve; anélkül rendszereink a káosz szélén billegnének.
2. Pontosság és hibacsökkentés
A negatív visszacsatolás drámaian javítja a rendszer pontosságát. Mivel a kimeneti jelet folyamatosan összehasonlítják a referenciajellel, a rendszer képes minimalizálni a hiba jelet. Bármilyen eltérés azonnal korrekciót eredményez, csökkentve ezzel a statikus és dinamikus hibákat. Ez különösen fontos olyan alkalmazásokban, mint a precíziós megmunkálás, a laboratóriumi mérések vagy a hálózati feszültségszabályozás.
3. Zavarelnyomás (Disturbance Rejection)
A külső zavaró jelek, mint például a hőmérséklet-ingadozás, a terhelés változása vagy az elektromos zaj, jelentősen befolyásolhatják egy rendszer teljesítményét. A negatív visszacsatolás hatékonyan képes elnyomni ezeket a zavarokat. Ha egy zavar hatására a kimenet eltér a kívánt értéktől, a visszacsatoló hurok azonnal észleli ezt az eltérést és ellenkező irányú korrekciót kezdeményez, minimalizálva a zavar hatását a kimenetre.
4. Érzéketlenség a paraméterváltozásokra (Robustness)
A valós rendszerekben a komponensek tulajdonságai (pl. ellenállások értéke, motorok hatásfoka, szenzorok kalibrációja) idővel vagy a környezeti feltételek hatására változhatnak. Egy nyílt hurkú rendszer kimenete nagymértékben függ ezektől a paraméterektől. A negatív visszacsatolás azonban robustussá teszi a rendszert; a kimenet kevésbé lesz érzékeny a belső paraméterek változásaira, mert a hurok folyamatosan korrigálja az eltéréseket, még akkor is, ha azok a belső komponensek „öregedéséből” fakadnak. Ez meghosszabbítja a berendezések élettartamát és csökkenti a karbantartási igényt.
5. Sávszélesség növelése és linearitás javítása
Elektronikai erősítők esetében a negatív visszacsatolás javítja az erősítő linearitását (csökkenti a torzítást) és növeli a sávszélességét. Ez azt jelenti, hogy az erősítő szélesebb frekvenciatartományban képes hűen reprodukálni a bemeneti jelet, és kevésbé torzítja azt. Ez kritikus fontosságú például audiorendszerekben, rádiófrekvenciás kommunikációban és precíziós mérőeszközökben.
Ezen előnyök kombinációja teszi a negatív visszacsatolást a modern mérnöki tudomány egyik legértékesebb eszközévé, lehetővé téve olyan komplex és megbízható rendszerek tervezését és kivitelezését, amelyek a mindennapi életünk szerves részét képezik.
Negatív és pozitív visszacsatolás: a különbség
A visszacsatolás általános fogalma magában foglalja a pozitív és a negatív visszacsatolást is, de a kettő működési elve és hatása alapvetően eltérő. Míg a negatív visszacsatolás a stabilitást és a szabályozhatóságot szolgálja, addig a pozitív visszacsatolás általában erősítést, gyorsuló folyamatokat és instabilitást eredményez.
Pozitív visszacsatolás (regeneratív visszacsatolás)
A pozitív visszacsatolás során a kimeneti jel egy része úgy kerül vissza a bemenetre, hogy az erősíti az eredeti bemeneti jelet, vagy abba az irányba hat, ami növeli a kimeneti eltérést. Ez öngerjesztő folyamatokat indít el, amelyek gyorsan eltávolítják a rendszert az egyensúlyi állapotától. Ennek következtében a rendszer vagy egy végállapotba kerül (telítődik, oszcillál, vagy eléri a maximális/minimális értékét), vagy instabillá válik.
Példák a pozitív visszacsatolásra:
- Mikrofon gerjedése: Amikor egy mikrofon túl közel van egy hangszóróhoz, a hangszóró által kibocsátott hangot a mikrofon újra felveszi, és ez a jel újra erősödik, ami egy hangos, sípoló hanghoz vezet.
- Rákos sejtek növekedése: A rákos sejtek osztódása felgyorsul, ami exponenciális növekedéshez vezet.
- Lavina: Egy kis mozgás elindít egy nagyobb mozgást, ami még nagyobb mozgást eredményez, és így tovább.
- Hidak rezonanciája: Bizonyos frekvenciájú szél hatására a híd lengése felerősödhet, ami szélsőséges esetben a híd összeomlásához vezethet (pl. Tacoma Narrows híd).
Bár a pozitív visszacsatolás általában instabil rendszereket eredményez, bizonyos alkalmazásokban hasznos lehet, például oszcillátorok (jelgenerátorok) építésénél, ahol a fenntartott rezgés a cél, vagy bistabil áramkörökben (pl. flip-flopok), ahol két stabil állapot között kell váltani.
A kritikus különbség
A kulcsfontosságú különbség a visszacsatolás előjele. A negatív visszacsatolás csökkenti a bemeneti jelet vagy a hiba jelet, stabilizálva a rendszert. A pozitív visszacsatolás növeli a bemeneti jelet vagy a hiba jelet, instabilitást és öngerjesztő folyamatokat okozva. A mérnöki szabályozástechnikában szinte kizárólag a negatív visszacsatolás a cél, mivel ez teszi lehetővé a rendszerek pontos és stabil vezérlését.
Ez a kontraszt rávilágít arra, miért olyan alapvető a negatív visszacsatolás a megbízható és szabályozott technológiai rendszerek tervezésében. A természetben is számtalan példát találunk mindkét típusra, de az élet fenntartásához és a komplex rendszerek működéséhez a negatív visszacsatolási hurkok elengedhetetlenek.
A negatív visszacsatolás alkalmazásai: széles spektrumú megoldások
A negatív visszacsatolás elve annyira alapvető és univerzális, hogy a technológia szinte minden területén találkozhatunk vele. Alkalmazásai rendkívül sokrétűek, és a mindennapi életünk számos aspektusát érintik. Vizsgáljuk meg a legfontosabb területeket részletesebben.
1. Elektronika és távközlés
Az elektronika az egyik olyan terület, ahol a negatív visszacsatolás forradalmasította a tervezést és a teljesítményt. Harold S. Black eredeti munkája is az erősítők stabilitásának javítására irányult.
- Műveleti erősítők (Op-Amp): A műveleti erősítők a modern analóg áramkörök alapkövei. Szinte mindig negatív visszacsatolással működnek, ami stabilizálja az erősítést, javítja a linearitást, növeli a sávszélességet és csökkenti a torzítást. Nélkülük a legtöbb audioerősítő, szűrő, feszültségszabályozó és szenzor interfész nem működne megbízhatóan.
- Feszültségszabályozók: A tápegységekben a negatív visszacsatolás biztosítja, hogy a kimeneti feszültség stabil maradjon, még a bemeneti feszültség ingadozása vagy a terhelés változása esetén is. Egy érzékelő méri a kimeneti feszültséget, összehasonlítja egy referenciafeszültséggel, és a hiba jel alapján korrigálja a szabályozó elemet (pl. tranzisztort).
- Aktív szűrők: A negatív visszacsatolás műveleti erősítőkkel kombinálva lehetővé teszi aktív szűrők építését, amelyek pontosan szabályozható frekvenciaválaszúak, és hatékonyabban szűrik a zajt, mint passzív társaik.
- PLL (Phase-Locked Loop) áramkörök: Ezek az áramkörök egy kimeneti jel fázisát egy referenciajel fázisához igazítják. A visszacsatolás folyamatosan összehasonlítja a két fázist, és a hiba alapján korrigálja a kimeneti oszcillátor frekvenciáját és fázisát. Fontosak a rádiókommunikációban, frekvenciaszintézisben és adatvisszaállításban.
2. Gépészet és robotika
A mechanikai rendszerekben a negatív visszacsatolás a precíz mozgásvezérlés és az automatizálás kulcsa.
- Szervo rendszerek: Ezek a rendszerek motorok helyzetét, sebességét vagy nyomatékát szabályozzák rendkívül pontosan. Egy enkóder vagy potenciométer méri a motor aktuális pozícióját, visszacsatolja azt egy szabályozóhoz, amely összehasonlítja a kívánt pozícióval, és a hiba alapján vezérli a motort. Ez alapvető a robotkarokban, CNC gépekben és drónokban.
- Tempomat (Cruise Control): Az autók tempomatja folyamatosan figyeli a jármű sebességét. Ha a sebesség eltér a beállított értéktől, a rendszer automatikusan korrigálja a motor teljesítményét (gázadás vagy elvétel), hogy fenntartsa a kívánt sebességet.
- Robotkarok és ipari automatizálás: A robotkarok minden egyes ízületének pontos pozíció- és sebességszabályozása negatív visszacsatolású hurkokon keresztül történik. Ez biztosítja, hogy a robot pontosan elvégezze a feladatát, és ellenálljon a külső erőknek.
- Légkondicionáló és fűtési rendszerek: A termosztátok már említett példája mellett, a modern HVAC (fűtés, szellőzés, légkondicionálás) rendszerek komplex negatív visszacsatolási hurkokat használnak a hőmérséklet, páratartalom és légnyomás pontos szabályozására épületekben.
3. Ipari folyamatszabályozás
A gyárakban, erőművekben és vegyipari üzemekben a negatív visszacsatolás nélkülözhetetlen a termelés hatékonyságának, biztonságának és minőségének fenntartásához.
- Hőmérséklet-szabályozás: Vegyi reaktorokban, kemencékben vagy élelmiszeripari feldolgozó berendezésekben a pontos hőmérséklet fenntartása kritikus. Hőmérséklet-érzékelők mérik az aktuális értéket, a szabályozó pedig fűtőelemeket vagy hűtőrendszereket vezérel a kívánt hőmérséklet eléréséhez.
- Nyomás- és áramlásszabályozás: Gáz- és folyadékvezetékekben, valamint tartályokban a nyomás és az áramlási sebesség szabályozása elengedhetetlen a biztonságos és hatékony működéshez. Szelepek és szivattyúk vezérlésével valósul meg a negatív visszacsatolású szabályozás.
- Szintszabályozás: Tartályok folyadékszintjének fenntartása szintén visszacsatoláson alapul, ahol szintérzékelők és szivattyúk vagy szelepek működnek együtt.
4. Biológia és élettudományok
Az élő szervezetek tele vannak negatív visszacsatolási hurkokkal, amelyek fenntartják a homeosztázist, azaz a belső környezet állandóságát.
- Testhőmérséklet-szabályozás: Az emberi test hipotalamusz nevű része „termosztátként” működik. Ha a testhőmérséklet emelkedik, izzadás és értágulás hűti a testet. Ha csökken, remegés és érszűkület segít hőt termelni és megtartani. Ez egy klasszikus negatív visszacsatolási hurok.
- Vércukorszint-szabályozás: Étkezés után a vércukorszint emelkedik, ami inzulin termelését váltja ki a hasnyálmirigyben. Az inzulin segít a sejteknek felvenni a glükózt, csökkentve ezzel a vércukorszintet. Ha a vércukorszint túl alacsony, a glukagon hormon emeli azt.
- Hormonális szabályozás: Számos hormontermelő mirigy működése negatív visszacsatolással szabályozott. Például a pajzsmirigy hormonok magas szintje gátolja a TSH (pajzsmirigy-stimuláló hormon) termelődését az agyalapi mirigyben, így fenntartva az egyensúlyt.
- Vérnyomás-szabályozás: A baroreceptorok érzékelik a vérnyomás változásait, és az agy ezen információk alapján szabályozza a szívverés sebességét és az erek tónusát, hogy fenntartsa az optimális vérnyomást.
5. Közlekedés és járműipar
A modern járművek biztonsági és kényelmi rendszerei nagymértékben támaszkodnak a negatív visszacsatolásra.
- ABS (Blokkolásgátló fékrendszer): Az ABS folyamatosan figyeli a kerekek fordulatszámát. Ha egy kerék blokkolni kezdene fékezéskor, a rendszer csökkenti a féknyomást az adott keréken, majd újra növeli. Ez a gyors ki-be kapcsolgatás (visszacsatolás) megakadályozza a kerék blokkolását, fenntartva az irányíthatóságot.
- ESP/ESC (Elektronikus menetstabilizáló program/Electronic Stability Control): Ez a rendszer érzékeli, ha az autó megcsúszik vagy elveszíti az irányíthatóságát. Különböző szenzorok (fordulatszám, kormányszög, oldalsó gyorsulás) segítségével elemzi a jármű mozgását, és célzottan fékez egy vagy több kereket, illetve csökkenti a motor teljesítményét, hogy visszaszerezze az irányítást.
- Autonóm járművek: Az önvezető autók a legkomplexebb negatív visszacsatolású rendszerek közé tartoznak. Kamerák, radarok, lidarok folyamatosan gyűjtenek adatokat a környezetről, ezeket a központi vezérlőegység összehasonlítja a kívánt útvonallal és sebességgel, majd korrigálja a kormányzást, a fékezést és a gázpedált.
6. Informatikai rendszerek és szoftverfejlesztés
A szoftverek és hálózati rendszerek is alkalmaznak visszacsatolási hurkokat a stabilitás és a teljesítmény optimalizálására.
- Hálózati forgalomszabályozás (Congestion Control): Az interneten a TCP protokoll például negatív visszacsatolást használ a hálózati torlódások kezelésére. Ha a hálózat túlterhelt (csomagvesztés történik), a küldő automatikusan csökkenti az adatátviteli sebességet, amíg a hálózat újra stabilizálódik.
- Szoftveres hibajavítás és önkorrekció: Bizonyos rendszerekben a szoftver figyeli a saját teljesítményét, és ha hibát észlel (pl. túl sok erőforrást használ, vagy összeomlásra utaló jeleket mutat), automatikusan újraindít egy modult, vagy alternatív útvonalat választ a feldolgozásra.
- Adatbázis-kezelő rendszerek: Az adatbázisok teljesítmény-monitorozó rendszerei figyelik a lekérdezések sebességét és a rendszer terhelését. Ha a teljesítmény romlik, riasztásokat küldhetnek, vagy automatikusan optimalizálhatják az indexeket, ami egyfajta lassú negatív visszacsatolás.
7. Környezetvédelem és klímaszabályozás
A természetes rendszerekben is megfigyelhetők negatív visszacsatolási hurkok, amelyek fenntartják az ökológiai egyensúlyt.
- Folyók vízszint-szabályozása: A folyók vízszintje, bár nagyrészt természetes tényezőktől függ, de gátak és zsilipek segítségével szabályozható, emberi beavatkozással létrehozva visszacsatolási hurkokat az árvízvédelem vagy a vízellátás biztosítására.
- Szén-dioxid körforgás: A Föld klímája komplex visszacsatolási rendszerek hálózatán keresztül működik. Például a növények fotoszintézise szén-dioxidot von ki a légkörből. Ha a CO2 szint emelkedik, a növekedési potenciál nő, ami több CO2 megkötését eredményezi (bár ez a hurok kapacitása korlátozott és lassan reagál az emberi kibocsátásra).
A fenti példák csak egy töredékét mutatják be a negatív visszacsatolás hihetetlenül széleskörű alkalmazásainak. Lényegében minden olyan rendszerben, ahol egy paramétert egy kívánt érték körül kell tartani, vagy egy folyamatot stabilizálni kell, a negatív visszacsatolás elengedhetetlen szerepet játszik.
A negatív visszacsatolás kihívásai és korlátai
Bár a negatív visszacsatolás rendkívül erőteljes és sokoldalú eszköz, nem mentes a kihívásoktól és korlátoktól. A rendszerek tervezése során alaposan figyelembe kell venni ezeket a tényezőket a stabil és optimális működés biztosítása érdekében.
1. Stabilitási problémák és oszcilláció
Paradox módon, bár a negatív visszacsatolás a stabilitás biztosítására szolgál, rosszul tervezve maga is okozhat instabilitást vagy oszcillációt. Ez akkor fordul elő, ha a visszacsatolási hurokban túl nagy az erősítés, vagy jelentős időbeli késleltetések (time delays) vannak a jel útjában. A rendszer túllőhet a célon, majd visszalendülhet, és ezt ismételve folyamatosan oszcillálhat a kívánt érték körül, vagy akár egyre nagyobb amplitúdójú lengésekbe kezdhet, ami a rendszer összeomlásához vezethet.
A stabilitási kritériumok (pl. Nyquist-kritérium, Bode-diagramok) a szabályozástechnikában kulcsfontosságúak a hurok stabilitásának elemzésére és biztosítására a tervezési fázisban. A PID szabályozók hangolása (tuning) is ezen a célon alapul, hogy megtalálja a megfelelő egyensúlyt a gyors reakció és a stabilitás között.
2. Túllövés (Overshoot) és lecsengési idő (Settling Time)
Egy gyorsan reagáló negatív visszacsatolású rendszer gyakran mutat túllövést, azaz a kimeneti érték átmenetileg meghaladja a kívánt referenciaértéket, mielőtt stabilizálódna. Ezután jellemzően oszcillálva közelíti meg a célállapotot. A lecsengési idő az az időtartam, amíg a rendszer kimenete a referenciaérték egy bizonyos toleranciáján belülre kerül és ott is marad. A túlzott túllövés vagy a hosszú lecsengési idő nem kívánatos lehet bizonyos alkalmazásokban, ahol a gyors és pontos beállás kritikus.
3. Érzékelő zaj és mérési hibák
A negatív visszacsatolási hurok teljesítménye nagymértékben függ az érzékelő pontosságától és zajszintjétől. Ha az érzékelő zajos vagy pontatlan, a szabályozó téves hibajelet kap, ami nem megfelelő korrekciós lépésekhez vezethet. Ez instabilitást, vibrációt (hunting) vagy csökkent pontosságot okozhat. A zajszűrés és a precíziós érzékelők használata elengedhetetlen a megbízható működéshez.
4. Tervezési komplexitás és hangolás
A negatív visszacsatolású rendszerek tervezése és implementálása bonyolult lehet, különösen összetett, több bemenetű és kimenetű (MIMO) rendszerek esetében. A szabályozó paramétereinek (pl. PID-paraméterek) hangolása (tuning) gyakran időigényes folyamat, amelyhez szakértelem és tapasztalat szükséges. A rosszul hangolt szabályozó instabil, lassú vagy pontatlan rendszert eredményezhet.
A negatív visszacsatolás ereje a precíz hangolásban rejlik; egy rosszul beállított hurok több kárt okozhat, mint hasznot.
5. Telítettség (Saturation)
A beavatkozó egységek (pl. motorok, szelepek) korlátozott kimeneti teljesítménnyel vagy tartománnyal rendelkeznek. Ha a szabályozó túl nagy korrekciós jelet generál, amely meghaladja a beavatkozó képességeit, az telítettséghez vezethet. Ez torzítja a rendszer válaszát, csökkenti a hatékonyságot, és további stabilitási problémákat okozhat.
6. Késleltetések (Delays)
A rendszer különböző pontjain fellépő késleltetések (pl. érzékelési késleltetés, adatfeldolgozási késleltetés, beavatkozó reakcióideje, fizikai folyamatok tehetetlensége) jelentősen ronthatják a negatív visszacsatolási hurok teljesítményét. A túl nagy késleltetés instabilitást és oszcillációt okozhat, mivel a korrekciós jel túl későn érkezik ahhoz, hogy hatékonyan stabilizálja a rendszert.
Ezen kihívások ellenére a negatív visszacsatolás továbbra is a leggyakrabban alkalmazott szabályozási elv, mivel a megfelelő tervezéssel és hangolással a legtöbb korlát leküzdhető, és a nyújtott előnyök messze felülmúlják a nehézségeket.
Szabályozási stratégiák és tervezési szempontok
A negatív visszacsatolású rendszerek hatékony tervezése és implementálása komplex feladat, amely számos szabályozási stratégia és mérnöki megfontolás ismeretét igényli. A cél mindig a kívánt teljesítmény (pontosság, stabilitás, gyorsaság, zavarelnyomás) elérése a rendelkezésre álló erőforrások és korlátok figyelembevételével.
1. A PID szabályozó: a vezérlés „svájci bicskája”
A PID szabályozó (Proportional-Integral-Derivative controller) kétségkívül a legelterjedtebb szabályozó algoritmus az ipari és technológiai alkalmazásokban. Egyszerűsége, robusztussága és hatékonysága miatt a negatív visszacsatolású rendszerek szinte minden területén találkozhatunk vele.
A PID szabályozó a hiba jel (a referencia és a mért kimenet közötti különbség) három különböző aspektusát veszi figyelembe a beavatkozó jel generálásához:
- Proporcionális (P) tag: A hiba jel aktuális nagyságával arányos korrekciót ad. Minél nagyobb a hiba, annál nagyobb a korrekció. Ez gyors reagálást biztosít, de önmagában gyakran hagy egy állandósult hibát (offset).
- Integráló (I) tag: A hiba jel időbeli összegét veszi figyelembe. Célja az állandósult hiba kiküszöbölése. Ha van egy kis, de tartós hiba, az integráló tag idővel felépül, és addig növeli a korrekciót, amíg a hiba nullára nem csökken.
- Deriváló (D) tag: A hiba jel változási sebességével arányos korrekciót ad. Ez előrejelzi a hiba jövőbeli viselkedését, és segít csökkenteni a túllövést és a rendszert stabilizálni. Különösen hasznos a gyorsan változó folyamatoknál.
A három tag arányát (Kp, Ki, Kd paraméterek) a rendszer specifikus jellemzőihez kell hangolni. A PID szabályozók hangolása kritikus lépés, amely gyakran iteratív folyamat, és célja az optimális egyensúly megtalálása a gyors válasz, a minimális túllövés és a stabilitás között.
2. Stabilitási kritériumok és analízis
A negatív visszacsatolású rendszerek tervezésének egyik legfontosabb aspektusa a stabilitás biztosítása. A szabályozástechnikában számos matematikai eszköz és kritérium áll rendelkezésre ennek elemzésére:
- Routh-Hurwitz kritérium: Algebrai módszer, amely a rendszer karakterisztikus egyenletének gyökereiből következtet a stabilitásra.
- Nyquist-kritérium: Grafikus módszer, amely a nyílt hurkú frekvenciaátviteli függvény alapján határozza meg a zárt hurkú rendszer stabilitását. Különösen hasznos a fázis- és erősítési tartalékok (gain and phase margin) meghatározására, amelyek a rendszer stabilitásának mértékét jelzik.
- Bode-diagramok: Szintén grafikus módszer, amely az erősítés és a fázis frekvenciafüggését mutatja be. Segít a stabilitási tartalékok vizuális ellenőrzésében és a szabályozó hangolásában.
- Gyökhely-diagram (Root Locus): Megmutatja, hogyan változnak a rendszer pólusai (gyökerei) egy paraméter (pl. erősítés) változásával, segítve a stabilitási határok azonosítását.
Ezen analitikai eszközök használata elengedhetetlen a komplex rendszerek tervezésénél, ahol az intuitív megközelítés gyakran elégtelen.
3. Szűrők és zajcsökkentés
Mivel a negatív visszacsatolás érzékeny az érzékelő zajára, a bemeneti jelek és a visszacsatolt jelek szűrése kritikus fontosságú. Aluláteresztő szűrőket (low-pass filters) gyakran alkalmaznak a magas frekvenciás zaj eltávolítására, amely zavarhatja a szabályozót és oszcillációt okozhat. A digitális rendszerekben átlagoló vagy mediánszűrőket is használnak a mérési zaj csökkentésére.
4. Antiwashout és telítettség kezelése
A PID szabályozók integráló tagja hajlamos lehet a telítettségre (windup), ha a beavatkozó korlátai miatt a szabályozó kimenete hosszú ideig maximális vagy minimális értéken van. Ez felhalmozott hibát eredményez, ami a telítettség megszűnése után lassú és túlzott reakcióhoz vezet. Az antiwashout technikák megakadályozzák az integráló tag telítődését, javítva a rendszer viselkedését extrém körülmények között.
5. Modell alapú szabályozás
Fejlettebb alkalmazásokban a rendszer matematikai modelljét is felhasználják a szabályozó tervezéséhez. A modell alapú szabályozás, mint például az adaptív szabályozás vagy a prediktív szabályozás (Model Predictive Control, MPC), képes dinamikusan alkalmazkodni a rendszer paramétereinek változásaihoz vagy a külső zavarokhoz, és optimalizálni a teljesítményt.
Összességében a negatív visszacsatolású rendszerek tervezése egy komplex mérnöki feladat, amely magában foglalja az elméleti alapok, a gyakorlati megvalósítások és a lehetséges problémák alapos ismeretét. A helyesen tervezett és hangolt rendszer azonban páratlan stabilitást, pontosságot és megbízhatóságot nyújt.
A jövő perspektívái: adaptív rendszerek és mesterséges intelligencia
A negatív visszacsatolás elve időtálló, de alkalmazási módjai és a vele kombinált technológiák folyamatosan fejlődnek. A jövőben várhatóan még intelligensebb, adaptívabb és autonómabb rendszerek jönnek létre, amelyek a klasszikus visszacsatolási elveket a legmodernebb számítástechnikai megoldásokkal ötvözik.
1. Adaptív szabályozás
A hagyományos negatív visszacsatolású rendszerek optimális teljesítménye gyakran függ a rendszer paramétereinek viszonylagos állandóságától. Azonban sok valós folyamat paraméterei változhatnak az idővel (pl. az alkatrészek öregedése, a környezeti feltételek változása, a terhelés dinamikája). Az adaptív szabályozás célja, hogy a szabályozó paraméterei (pl. a PID-tagok erősítése) automatikusan alkalmazkodjanak ezekhez a változásokhoz.
Az adaptív rendszerek folyamatosan becsülik a szabályozott szakasz (plant) aktuális paramétereit, és ennek alapján módosítják a szabályozó beállításait. Ezáltal a rendszer robusztusabbá válik, és képes fenntartani az optimális teljesítményt változó körülmények között is. Például egy repülőgép vezérlőrendszere adaptív módon alkalmazkodhat a különböző repülési magasságokhoz és sebességekhez, ahol a levegő sűrűsége és a aerodinamikai erők eltérőek.
2. Mesterséges intelligencia és gépi tanulás a visszacsatolási hurkokban
A mesterséges intelligencia (MI) és különösen a gépi tanulás (ML) forradalmasítja a szabályozástechnikát. Az MI-alapú algoritmusok képesek hatalmas adatmennyiségekből tanulni, azonosítani a komplex mintázatokat és optimalizálni a szabályozási stratégiákat, amelyek meghaladják a hagyományos módszerek képességeit.
- Megerősítéses tanulás (Reinforcement Learning – RL): Az RL algoritmusok képesek „tapasztalatokból” tanulni, hogyan kell optimálisan vezérelni egy rendszert. Ahelyett, hogy előre programozott szabályokat követnének, a rendszer kipróbál különböző akciókat, és a kapott „jutalom” vagy „büntetés” alapján finomítja a stratégiáját. Ez különösen ígéretes azokban az esetekben, ahol a rendszer dinamikája rendkívül komplex vagy nehezen modellezhető, például az autonóm robotikában vagy a komplex ipari folyamatok optimalizálásában.
- Neurális hálózatok: A mély neurális hálózatok felhasználhatók a rendszer viselkedésének modellezésére, a szenzoradatok feldolgozására, vagy akár magának a szabályozónak a megvalósítására is. Képesek nemlineáris kapcsolatokat is kezelni, ami a hagyományos lineáris szabályozók számára kihívást jelent.
- Fuzzy logika: A fuzzy szabályozók lehetővé teszik az emberi szakértelem és az „homályos” szabályok beépítését a szabályozási stratégiába, ami különösen hasznos olyan rendszerekben, ahol a pontos matematikai modell nehezen állítható fel, vagy az emberi operátorok intuícióját szeretnénk modellezni.
Az MI integrálása a negatív visszacsatolási hurkokba lehetővé teszi a rendszerek számára, hogy ne csak stabilan működjenek, hanem intelligensen optimalizálják is a teljesítményüket, alkalmazkodjanak a változásokhoz és tanuljanak a hibáikból.
3. Kiber-fizikai rendszerek és az Ipar 4.0
A kiber-fizikai rendszerek (CPS) és az Ipar 4.0 koncepciója a fizikai folyamatok és a számítástechnikai hálózatok szoros integrációját jelenti. Ezek a rendszerek hatalmas mennyiségű adatot gyűjtenek a szenzoroktól, elemzik azokat, és valós időben vezérlik a fizikai folyamatokat, gyakran negatív visszacsatolási hurkokat használva.
Az MI és a gépi tanulás kulcsfontosságú ebben a paradigmában, mivel képessé teszik a CPS rendszereket az önoptimalizálásra, az autonóm döntéshozatalra és a prediktív karbantartásra. Például egy okosgyárban a gépek folyamatosan monitorozzák a saját állapotukat, és a visszacsatolási adatok alapján optimalizálják a gyártási folyamatot, előre jelezve a meghibásodásokat és automatikusan elrendelve a karbantartást.
4. Komplex, elosztott rendszerek szabályozása
A jövőben egyre több olyan rendszerrel találkozunk, amelyek elosztottak, azaz több, egymással kommunikáló, de földrajzilag elkülönülő egységből állnak (pl. okosvárosok, energiarendszerek, autonóm járműflották). Ezeknek a rendszereknek a szabályozása új kihívásokat támaszt, ahol a negatív visszacsatolás elvei továbbra is érvényesek, de a kommunikációs késleltetések, az adatbiztonság és a konszenzus elérése további komplexitást jelent. Az MI és az elosztott szabályozási algoritmusok kulcsfontosságúak lesznek ezen rendszerek stabilitásának és hatékonyságának biztosításában.
A negatív visszacsatolás tehát nem egy statikus elv, hanem egy dinamikusan fejlődő terület, amely a legújabb technológiai innovációkkal kombinálva a jövő intelligens, önvezérlő rendszereinek alapját képezi.
Gyakorlati példák a mindennapokból: a negatív visszacsatolás körülöttünk

A negatív visszacsatolás elve annyira áthatja a modern technológiát és a természetet, hogy gyakran észre sem vesszük a jelenlétét. Pedig számos mindennapi tárgy és jelenség működése ezen az alapelven nyugszik, biztosítva számunkra a kényelmet, a biztonságot és a hatékonyságot.
1. Háztartási gépek
- Mosógép: A modern mosógépek számos visszacsatolási hurkot alkalmaznak. Például a vízhőmérséklet-szabályozás (fűtőszál és hőmérséklet-érzékelő), a dob fordulatszámának szabályozása (motor és fordulatszám-érzékelő), vagy a vízszint érzékelése (szintérzékelő és vízbeeresztő szelep).
- Sütő: A sütő termosztátja folyamatosan méri a belső hőmérsékletet, és a beállított értékhez képest szabályozza a fűtőszálak működését, hogy a hőmérséklet stabil maradjon.
- Hűtőszekrény: Hasonlóan a sütőhöz, a hűtőszekrény is termosztátot használ a belső hőmérséklet fenntartására, a kompresszor ki- és bekapcsolásával.
- Kávéfőző: Sok kávéfőző is hőmérséklet-szabályozást alkalmaz a víz optimális hőmérsékletének fenntartására a kávékészítés során.
- Porszívó szívóerő-szabályozása: Egyes intelligens porszívók érzékelik a szívóerő csökkenését (pl. eltömődés miatt), és automatikusan növelik a motor teljesítményét, hogy fenntartsák a hatékony tisztítást.
2. Járművek
- Kormányzás: Bár nem direkt elektronikus visszacsatolás, az emberi sofőr maga egy komplex visszacsatolási hurok része. A szemeivel érzékeli az autó pozícióját az úton (kimenet), összehasonlítja a kívánt útvonallal (referencia), és a karjaival korrigálja a kormányzást (beavatkozó).
- Fékek: Az ABS és ESP rendszerek már említettek, de még a hagyományos hidraulikus fékrendszerek is tartalmaznak visszacsatolást a fékpedál és a féknyereg között, ahol a pedálnyomás arányos a fékhatással, és a sofőr „érzi” a fékezést.
- Üzemanyag-befecskendezés: A modern motorokban az oxigénérzékelő (lambda szonda) méri a kipufogógáz oxigéntartalmát. Ez a visszacsatolási jel segít a motorvezérlő egységnek (ECU) optimalizálni az üzemanyag-levegő keverék arányát a hatékony égés és a károsanyag-kibocsátás minimalizálása érdekében.
3. Személyes elektronika
- Okostelefon kamerájának autofókusza: A kamera érzékeli a kép élességét (visszacsatolás), és a lencse pozíciójának beállításával (beavatkozó) folyamatosan korrigálja azt, amíg a kép a legélesebb nem lesz.
- Fejhallgató zajszűrése (Active Noise Cancellation): Ezek a fejhallgatók mikrofonnal érzékelik a külső zajt (kimenet), majd egy ellentétes fázisú hanghullámot generálnak (beavatkozó), hogy semlegesítsék azt. Ez egy finomhangolt negatív visszacsatolási hurok.
- Projektor vagy kijelző fényerejének automatikus beállítása: A környezeti fényérzékelő méri a külső fényviszonyokat, és a kijelző fényerejét automatikusan beállítja a jobb olvashatóság és az energiafogyasztás optimalizálása érdekében.
4. Emberi test és mindennapi tevékenységek
- Egyensúlyozás: Az emberi test egy rendkívül komplex negatív visszacsatolású rendszer. A belső fülben lévő egyensúlyi szervek (érzékelők) érzékelik a test pozícióját és mozgását. Az agy (szabályozó) utasítja az izmokat (beavatkozók) a testtartás korrigálására, hogy fenntartsuk az egyensúlyt.
- Látás: A szemlencse fókuszálása, a pupilla tágulása és szűkülése (fényerő-szabályozás) mind negatív visszacsatolású folyamatok, amelyek automatikusan alkalmazkodnak a környezeti feltételekhez.
- Vezetés: A sofőr, ahogy már említettük, maga is egy visszacsatolási hurok. De a legegyszerűbb példa: ha túl gyorsan megyünk egy kanyarba, a szemünk és agyunk azonnal érzékeli az eltérést a kívánt útvonaltól, és korrigáljuk a kormányzást és a sebességet.
Ezek a példák jól mutatják, hogy a negatív visszacsatolás nem csupán elvont mérnöki koncepció, hanem egy alapvető működési mechanizmus, amely észrevétlenül, de folyamatosan alakítja és optimalizálja a körülöttünk lévő világot, a legkisebb háztartási eszköztől a legösszetettebb biológiai folyamatokig.







