
Az inerciális irányítás, vagy más néven inerciális navigáció (INS – Inertial Navigation System), egy olyan kifinomult technológia, amely lehetővé teszi egy objektum pozíciójának, sebességének és orientációjának meghatározását külső referenciapontok, például GPS-jelek nélkül. Ez a képesség teszi az inerciális rendszereket felbecsülhetetlen értékűvé olyan környezetekben, ahol a műholdas navigáció nem elérhető, zavart vagy megbízhatatlan, például víz alatt, épületekben, sűrű városi környezetben, vagy éppen a világűrben. Működésének alapja a fizika egyik legősibb törvényén, Newton második törvényén nyugszik, amely szerint egy testre ható erő azonos a test tömegének és gyorsulásának szorzatával. Az inerciális rendszerek ezt az elvet használják fel a mozgás pontos nyomon követésére.
A rendszer lényege, hogy folyamatosan méri az objektumra ható gyorsulásokat és a forgási sebességeket. Ezeket az adatokat aztán integrálják az idő függvényében, hogy kiszámítsák a sebesség, majd ismételt integrálással a pozíció változását. Az orientáció meghatározásához pedig a forgási sebességek integrálására van szükség. Ez a módszer a holtverseny-számítás (dead reckoning) elvén alapul, ahol a kiindulási pontból indulva folyamatosan frissítik a pozíciót a megtett út és irány alapján. Az inerciális rendszerek függetlenek a külső jelektől, ami egyszerre az egyik legnagyobb előnyük és hátrányuk is, hiszen ez a függetlenség garantálja a zavarmentes működést, de a hibák felhalmozódásához is vezethet az idő múlásával.
Az inerciális irányítás rövid története és fejlődése
Az inerciális irányítás gondolata nem újkeletű; gyökerei a 20. század elejére nyúlnak vissza, amikor a repülés és a tengerészet egyre nagyobb távolságokat tett meg, és felmerült az igény a pontos, önálló navigációra. Az első gyakorlati alkalmazások a második világháború idején jelentek meg, különösen a német V-2 rakéták irányításában. Ezek a korai rendszerek hatalmasak, nehezek és rendkívül drágák voltak, mechanikus giroszkópokra és gyorsulásmérőkre épültek. A V-2 rakéta navigációs rendszere, bár primitívnek tűnik a mai sztenderdekhez képest, alapozta meg a modern inerciális navigációt, bemutatva a technológia potenciálját a célzott mozgás elérésében külső beavatkozás nélkül.
A hidegháború idején a technológia robbanásszerű fejlődésen ment keresztül, elsősorban a katonai alkalmazások, mint például a tengeralattjárók és interkontinentális ballisztikus rakéták (ICBM) igényei miatt. Az űrverseny további lendületet adott, hiszen az űrhajók navigációja kritikus fontosságú volt a küldetések sikeréhez. Az Apollo-program például rendkívül kifinomult inerciális rendszereket alkalmazott, amelyek elengedhetetlenek voltak a Holdra szálláshoz és a visszatéréshez. A 70-es és 80-as években jelentek meg az optikai giroszkópok (lézergiroszkópok és optikai szálas giroszkópok), amelyek jelentősen javították a pontosságot és a megbízhatóságot, miközben csökkentették a méretet és a súlyt. Ezek a fejlesztések nyitották meg az utat a szélesebb körű alkalmazások előtt.
A digitális technológia és a mikroelektronika fejlődésével a 90-es évektől kezdve a MEMS (Micro-Electro-Mechanical Systems) szenzorok terjedtek el, amelyek forradalmasították az inerciális navigációt. Ezek a parányi, olcsó és tömeggyártásra alkalmas szenzorok tették lehetővé, hogy az inerciális rendszerek a mindennapi élet részévé váljanak, megtalálhatók okostelefonokban, drónokban, autókban és számos más eszközben. A folyamatos miniatürizálás, a pontosság növelése és az algoritmusok finomítása a mai napig tartó fejlesztések mozgatórugója, lehetővé téve az egyre komplexebb és megbízhatóbb navigációs megoldásokat.
Az inerciális irányítás alapelvei: Newton és az integráció
Az inerciális irányítás alapvetően Newton mozgástörvényein nyugszik. A rendszer lényege, hogy egy test mozgását a rá ható erők és a test tehetetlensége alapján követi nyomon. Egy gyorsulásmérő méri a testre ható nem gravitációs gyorsulást, míg egy giroszkóp a test forgási sebességét érzékeli. Ezeket az adatokat gyűjti és dolgozza fel az inerciális mérőegység (IMU), majd a navigációs számítógép.
A legfontosabb elv a kétszeres integráció. Amikor a gyorsulásmérő adatokat szolgáltat a mért gyorsulásról, ezt az adatot egyszer integrálva megkapjuk a sebességet. Majd ezt a sebességadatot másodszor is integrálva meghatározható a test elmozdulása, azaz a pozíciója. Például, ha egy autó gyorsulását mérjük, az első integrálás megadja az autó sebességét az idő függvényében, a második integrálás pedig azt, hogy milyen messzire jutott el az autó a kiindulási ponttól. Ez a folyamat a tér három dimenziójában, azaz az X, Y és Z tengelyek mentén történik.
Az orientáció meghatározása hasonlóan történik, de a giroszkópok által mért szögsebességek alapján. A giroszkópok mérik, hogy az objektum milyen gyorsan fordul el a saját tengelyei körül. Ezeket a szögsebesség-adatokat integrálva megkapjuk az objektum aktuális orientációját, azaz a térbeli elhelyezkedését (dőlés, bólintás, fordulás). A navigációs számítógép folyamatosan frissíti ezeket az értékeket, létrehozva egy dinamikus modellt az objektum mozgásáról. Azonban minden integrációs lépés potenciális hibalehetőséget rejt magában, ami az idő múlásával felhalmozódó pontatlanságokhoz vezethet.
„Az inerciális navigáció a fizika eleganciájának és a mérnöki leleményességnek a tökéletes ötvözete, amely lehetővé teszi számunkra, hogy a térben és időben pontosan meghatározzuk a helyzetünket, anélkül, hogy a külvilágra kellene támaszkodnunk.”
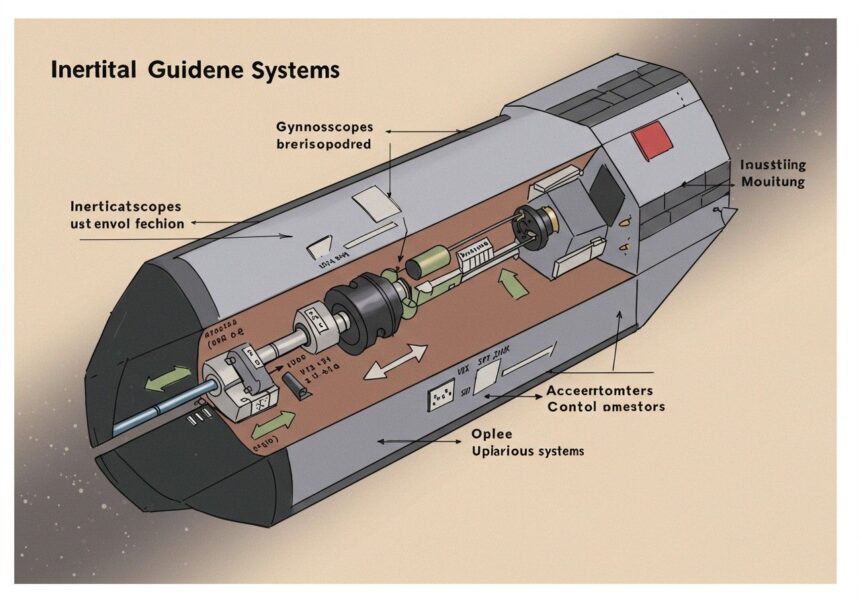
Kulcsfontosságú komponensek: az inerciális mérőegység (IMU)
Az inerciális irányítás szívét és lelkét az inerciális mérőegység (IMU) képezi. Ez az egység tartalmazza azokat a szenzorokat, amelyek a mozgási adatokat gyűjtik: a gyorsulásmérőket és a giroszkópokat. Az IMU feladata, hogy a lehető legpontosabban mérje a test lineáris és szöggyorsulásait a három térbeli tengely mentén.
Gyorsulásmérők
A gyorsulásmérők (accelerometers) olyan szenzorok, amelyek a testre ható nem gravitációs erők által okozott gyorsulást mérik. Ez az úgynevezett specifikus erő. Amikor egy autó elindul, a benne ülő személyt a háttámlához nyomja az erő, amit a gyorsulásmérő is érzékel. A gravitációt nem mérik közvetlenül, de a szenzor orientációjától függően a gravitációs gyorsulás komponense megjelenhet a mért adatokban. A gyorsulásmérők általában piezoelektromos, kapacitív vagy MEMS technológián alapulnak. A MEMS gyorsulásmérők kis méretük, alacsony költségük és robusztusságuk miatt váltak rendkívül népszerűvé, különösen a fogyasztói elektronikában.
Működési elvük gyakran egy mikro-mechanikai szerkezet, amely egy mozgó tömeget tartalmaz, ami rugókon keresztül kapcsolódik a szenzor házához. Amikor a szenzor gyorsul, a tehetetlenség miatt a tömeg elmozdul a házhoz képest. Ezt az elmozdulást elektromos jelekké alakítják (pl. kapacitásváltozással), amelyek arányosak a gyorsulással. Három gyorsulásmérőre van szükség ahhoz, hogy a tér három dimenziójában (X, Y, Z tengelyek mentén) érzékeljük a lineáris gyorsulásokat.
Giroszkópok
A giroszkópok (gyroscopes) feladata a test forgási sebességének, vagy más néven szögsebességének mérése. Ez alapvető az objektum orientációjának meghatározásához. A giroszkópok többféle technológián alapulhatnak:
- Mechanikus giroszkópok: Ezek a legrégebbi típusok, amelyek egy gyorsan forgó tömeg tehetetlenségét használják ki. Bár rendkívül pontosak lehetnek, nagyok, nehezek, drágák és mechanikai kopásnak vannak kitéve.
- Optikai giroszkópok: Ide tartoznak a lézergiroszkópok (RLG – Ring Laser Gyro) és az optikai szálas giroszkópok (FOG – Fiber Optic Gyro). Ezek a fény Sagnac-effektusát használják ki, ami azt jelenti, hogy két ellenkező irányban haladó fényhullám közötti fáziseltolódást mérik, ami arányos a forgási sebességgel. Rendkívül pontosak és megbízhatóak, nincsenek mozgó alkatrészeik, ezért hosszú élettartamúak.
- MEMS giroszkópok: Ezek a legelterjedtebbek a modern alkalmazásokban. A Coriolis-erőt használják ki: egy rezgő elemet tartalmaznak, amely a forgás hatására elmozdul. Ez az elmozdulás arányos a szögsebességgel. Kicsik, olcsók, és alacsony energiafogyasztásúak, de pontosságuk általában elmarad az optikai giroszkópokétól.
Három giroszkópra van szükség ahhoz, hogy a test elfordulását mindhárom tengely körül (roll, pitch, yaw) mérni tudjuk. Az IMU tehát három gyorsulásmérőből és három giroszkópból áll, egyetlen egységbe integrálva.
A rendszer működési mechanizmusa: a navigációs algoritmusok
Miután az IMU begyűjtötte a gyorsulási és szögsebesség-adatokat, a navigációs számítógép feladata ezeket feldolgozni és értelmezni, hogy meghatározza az objektum aktuális állapotát. Ez a folyamat több lépésből áll, és komplex algoritmusokat igényel.
Koordináta-rendszerek
Az inerciális navigációban kulcsfontosságú a különböző koordináta-rendszerek közötti átváltás. Alapvetően három fő koordináta-rendszerrel dolgozunk:
- Test-koordináta-rendszer (Body frame): Ez az objektumhoz rögzített koordináta-rendszer, amelynek tengelyei általában az objektum hossztengelyével, szélességi tengelyével és magassági tengelyével esnek egybe. A szenzorok ebben a rendszerben mérik az adatokat.
- Navigációs-koordináta-rendszer (Navigation frame vagy Local Tangent Frame): Ez egy helyi, földi referenciához kötött koordináta-rendszer, amely általában az észak-kelet-le (NED) vagy észak-kelet-fel (ENU) irányokat követi. Ebben a rendszerben számítják ki a pozíciót és a sebességet.
- Föld-koordináta-rendszer (Earth-Centered, Earth-Fixed – ECEF): Ez egy globális koordináta-rendszer, amelynek origója a Föld középpontjában van, és a tengelyei a Földhöz rögzítettek. Ez a rendszer ideális a hosszú távú navigációhoz és a műholdas rendszerekkel való integrációhoz.
A navigációs algoritmusok feladata, hogy a test-koordináta-rendszerben mért adatokat átalakítsák a navigációs-koordináta-rendszerbe, figyelembe véve a Föld forgását és a gravitációt. Ez a transzformáció a kvaterniók vagy Euler-szögek segítségével történik.
Orientáció (attitude) meghatározása
Az orientáció, vagy attitűd, az objektum térbeli elhelyezkedését írja le a navigációs-koordináta-rendszerhez képest. Három fő komponense van:
- Dőlés (Roll): Az objektum hossztengelye körüli elfordulása.
- Bólintás (Pitch): Az objektum szélességi tengelye körüli elfordulása.
- Fordulás (Yaw): Az objektum függőleges tengelye körüli elfordulása (az irány).
A giroszkópokból származó szögsebesség-adatok integrálásával folyamatosan frissítik az objektum orientációját. Ez egy kritikus lépés, mert a helyes orientáció nélkül a gyorsulásmérő adatok sem értelmezhetők pontosan a navigációs-koordináta-rendszerben.
Sebesség és pozíció számítása
Miután az orientáció ismert, a gyorsulásmérőkből származó adatokat át lehet transzformálni a navigációs-koordináta-rendszerbe. Ezt követően levonják belőlük a gravitációs gyorsulás komponensét, és a maradékot integrálják. Az első integrálás eredménye az objektum sebessége. Ezt a sebességadatot újra integrálva kapjuk meg az objektum pozícióját a navigációs-koordináta-rendszerben (pl. északi szélesség, keleti hosszúság és magasság).
Ez a folyamat a holtverseny-számítás (dead reckoning) lényege. A rendszer a kezdeti pozícióból és sebességből kiindulva, a mért gyorsulások és szögsebességek alapján folyamatosan frissíti az objektum állapotát. Az elv egyszerűnek tűnik, de a gyakorlatban a szenzorok pontatlanságai és a számítási hibák miatt a pontosság az idő múlásával romlik, ami az inerciális rendszerek legnagyobb kihívása.
Az inerciális navigációs rendszerek típusai
Az inerciális navigációs rendszereket (INS) különböző szempontok szerint lehet csoportosítani, de a leggyakoribb megkülönböztetés a szenzorok rögzítési módja alapján történik: kardánfüggesztéses (gimbaled) és strapdown rendszerek.
Kardánfüggesztéses (gimbaled) rendszerek
A kardánfüggesztéses rendszerek a klasszikus megközelítést képviselik. Ezekben a rendszerekben a gyorsulásmérőket (általában három darabot) egy stabilizált platformra szerelik, amelyet egy sor kardánkeret (gimbal) tart. A kardánkeretek motorokkal vannak összekötve, amelyek folyamatosan mozgatják a platformot, hogy az mindig egy rögzített térbeli orientációt tartson fenn, általában a navigációs-koordináta-rendszerhez igazodva (pl. észak-kelet-le). Ez azt jelenti, hogy a gyorsulásmérők mindig ugyanabban az irányban mutatnak a térben, függetlenül az objektum forgásától.
Előnyök:
- A gyorsulásmérők közvetlenül a navigációs-koordináta-rendszerben mérnek, ami egyszerűsíti a számításokat, mivel nem kell folyamatosan transzformálni a gyorsulási vektorokat.
- Nagy pontosság érhető el, különösen a régebbi, nagy pontosságú mechanikus giroszkópokkal.
Hátrányok:
- Mechanikailag rendkívül komplexek, sok mozgó alkatrésszel, ami növeli a meghibásodás esélyét és a karbantartási igényt.
- Nagyok, nehezek és drágák.
- A kardánzár (gimbal lock) jelensége korlátozhatja a mozgási tartományt bizonyos extrém manőverek során.
Ezeket a rendszereket ma már ritkán használják, főként történelmi jelentőségük van, illetve nagyon speciális, rendkívül nagy pontosságot igénylő alkalmazásokban fordulhatnak elő, ahol a méret és költség nem elsődleges szempont.
Strapdown rendszerek
A strapdown rendszerek a modern inerciális navigáció alapját képezik, és mára szinte teljesen felváltották a kardánfüggesztéses rendszereket. Ebben az elrendezésben az IMU szenzorai (gyorsulásmérők és giroszkópok) közvetlenül az objektumhoz vannak rögzítve (strapped down), amelynek mozgását követni kívánjuk. Ez azt jelenti, hogy a szenzorok együtt forognak és gyorsulnak az objektummal.
Előnyök:
- Mechanikailag sokkal egyszerűbbek, nincsenek mozgó alkatrészek (kivéve magukat a szenzorokat), ami növeli a megbízhatóságot és csökkenti a karbantartást.
- Kisebbek, könnyebbek és olcsóbbak, különösen a MEMS technológia térnyerésével.
- Nincs kardánzár, így bármilyen orientációban működhetnek.
Hátrányok:
- A szenzorok a test-koordináta-rendszerben mérnek, ezért a navigációs számítógépnek folyamatosan és valós időben kell a mért adatokat áttranszformálnia a navigációs-koordináta-rendszerbe. Ez sokkal intenzívebb számítási teljesítményt igényel, mint a kardánfüggesztéses rendszereknél.
- A navigációs algoritmusok komplexebbek, és a transzformációs hibák potenciálisan növelhetik a driftet.
A strapdown rendszerek dominálnak a mai alkalmazásokban, a repülőgépektől az okostelefonokig, köszönhetően a digitális jelfeldolgozási képességek és a MEMS szenzorok fejlődésének. A számítási teljesítmény növekedésével a korábbi hátrányok nagyrészt elhanyagolhatóvá váltak, lehetővé téve a nagy pontosságú navigációt kompakt és költséghatékony csomagolásban.
Hibák és eltolódás (drift) az inerciális rendszerekben
Az inerciális irányítás legnagyobb kihívása a hibák felhalmozódása, vagy más néven a drift. Mivel a rendszer minden mozgási paramétert integrál, még a legkisebb szenzorhibák is kumulálódnak az idő múlásával, ami egyre nagyobb eltérést eredményez a valós pozíciótól, sebességtől és orientációtól. Ez a drift az inerciális rendszerek inherens tulajdonsága, és a pontosságuk korlátját jelenti önálló működés esetén.
Szenzorhibák
A szenzorok, legyenek azok gyorsulásmérők vagy giroszkópok, sosem tökéletesek. Számos hibaforrás járul hozzá a pontatlansághoz:
- Szenzor eltolódás (Bias vagy Offset): A szenzor kimenete még akkor is ad egy kis értéket, ha valójában nincs gyorsulás vagy forgás. Ez az offset a legjelentősebb hibaforrás, mivel minden integrációs lépésnél hozzáadódik az értékekhez, és az idővel lineárisan növeli a hibát. Egy kis állandó bias a gyorsulásmérőn másodpercenként egyre nagyobb sebességhibát, majd négyzetesen növekvő pozícióhibát okoz.
- Skála faktor hiba (Scale Factor Error): A szenzor kimeneti értéke nem pontosan arányos a valós bemeneti értékkel. Például, ha a szenzor azt állítja, hogy 10 m/s² gyorsulást mér, de valójában csak 9.8 m/s² volt, akkor ez a skála faktor hiba.
- Zaj (Noise): Véletlenszerű ingadozások a szenzor kimenetében, amelyek a mérési pontosságot rontják. Bár a zajt gyakran szűrik, a maradék zaj integrálódva véletlenszerű sétát (random walk) okoz a pozícióban és orientációban.
- Nem-linearitás (Non-linearity): A szenzor kimenete nem tökéletesen lineáris a bemeneti tartomány teljes hosszában.
- Tengelyek összehangolási hibái (Misalignment): A szenzorok érzékelő tengelyei nem tökéletesen merőlegesek egymásra, vagy nem pontosan illeszkednek a test-koordináta-rendszer tengelyeihez.
- Hőmérséklet-függés (Temperature Dependence): A szenzorok teljesítménye és hibái változhatnak a környezeti hőmérséklet függvényében.
Integrációs hibák
A szenzorokból származó adatok digitális feldolgozása diszkrét időpillanatokban történik. Az integráció során az időbeli lépések közötti gyorsulást vagy szögsebességet közelítik. Ezek a közelítések, bár minimálisak, szintén hozzájárulnak a hibák felhalmozódásához, különösen nagy sebességű vagy gyorsan változó mozgások esetén.
Kezdeti állapot hibái
Az inerciális navigáció a kezdeti állapot, azaz a kiindulási pozíció, sebesség és orientáció pontos ismeretét igényli. Bármilyen hiba a kezdeti értékekben azonnal beépül a számításokba, és kiinduló pontként szolgál a további hibák felhalmozódásához. Ezért az inerciális rendszerek inicializálása (alignálása) kritikus fontosságú. Az alignálás során a rendszer vagy külső referenciák (pl. GPS) segítségével, vagy a Föld forgásának és gravitációjának detektálásával határozza meg a kezdeti orientációt.
Összességében a drift azt jelenti, hogy az inerciális rendszer pontossága az idővel folyamatosan romlik. Egy óra múlva egy tipikus, közepes pontosságú INS több kilométeres pozícióhibát is felhalmozhat. Ezért az önálló inerciális navigációt gyakran csak rövid ideig vagy olyan környezetekben alkalmazzák, ahol a külső referencia teljesen hiányzik, és a drift tolerálható, vagy más rendszerekkel kombinálva kompenzálják.
A pontosság növelése és a hibák kompenzálása: szenzorfúzió
Az inerciális rendszerek inherens drift problémájának leküzdésére és a pontosság növelésére a legelterjedtebb és leghatékonyabb módszer a szenzorfúzió. Ez azt jelenti, hogy az inerciális szenzorok adatait más, külső referenciát használó navigációs szenzorok adataival kombinálják, egy kifinomult szűrőalgoritmus, leggyakrabban a Kalman-szűrő segítségével.
Kalman-szűrő
A Kalman-szűrő egy rekurzív algoritmus, amely becslést ad egy rendszer állapotáról (pl. pozíció, sebesség, orientáció) a mért adatok és a rendszer dinamikai modellje alapján. Két fő lépésből áll:
- Előrejelzés (Prediction): Az inerciális szenzorok adatait (gyorsulások, szögsebességek) felhasználva a szűrő előrejelzi a rendszer következő állapotát. Ez az inerciális navigáció holtverseny-számítási része.
- Frissítés (Update/Correction): Amikor külső referenciából származó mérési adat érkezik (pl. GPS pozíció, magnetométer irány), a szűrő összehasonlítja az előrejelzett állapotot a tényleges méréssel. A különbség alapján korrigálja az előrejelzést, és egyidejűleg becsüli az inerciális szenzorok hibáit (pl. biasokat).
A Kalman-szűrő intelligensen súlyozza az inerciális adatok és a külső mérések megbízhatóságát, figyelembe véve mindkét forrás zaját és pontatlanságát. Így képes a szenzorok hibáit becsülni és kompenzálni, drámaian csökkentve az inerciális driftet, és biztosítva a folyamatos, pontos és megbízható navigációt.
Szenzorfúzió más navigációs rendszerekkel
A Kalman-szűrőn keresztül számos más szenzor adata integrálható az inerciális rendszerbe:
- GPS/GNSS (Global Positioning System / Global Navigation Satellite System): A leggyakoribb és leghatékonyabb kombináció. A GPS/GNSS rendszerek pontos pozíció- és sebességadatokat szolgáltatnak, amelyekkel a Kalman-szűrő folyamatosan korrigálja az inerciális rendszer driftjét. Cserébe az INS áthidalja a GPS-jelvesztés időszakait (pl. alagutakban, sűrű városi környezetben), és nagy frekvenciájú, sima adatokat biztosít, amelyek a GPS-től önmagában nem várhatók el.
- Magnetométer: A magnetométerek a Föld mágneses terét mérik, és információt szolgáltatnak az objektum irányáról (yaw). Ez különösen hasznos az orientáció kezdeti alignálásához és a giroszkópok yaw-driftjének korrigálásához, bár a mágneses zavarok korlátozhatják a pontosságát.
- Barométer/Magasságmérő: A légnyomás mérésével pontos magassági információt nyújt, ami segít a vertikális pozícióhibák csökkentésében, különösen olyan esetekben, ahol a GPS magassági pontossága gyengébb lehet.
- Odometria (kerékfordulatszám-érzékelők): Járművekben a kerekek fordulatszámát mérve becsülhető a megtett távolság és a sebesség. Ez a bemenet rendkívül hasznos az inerciális rendszer pozíció- és sebességbecslésének finomításában, különösen alacsony sebességnél és GPS-jelvesztés esetén.
- Vizuális odometria (Visual Odometry – VO): Kamerák segítségével követi nyomon a környezet jellegzetességeit, és ebből számítja ki a kamera mozgását (pozíció- és orientációváltozást). Képes korrigálni az inerciális driftet, és különösen hasznos beltéri navigációban vagy GPS-mentes környezetben.
- Lidar/Radar: Ezek a szenzorok a környezet 3D-s térképét hozzák létre, és az egymást követő térképek összehasonlításával képesek a mozgás detektálására (SLAM – Simultaneous Localization and Mapping).
A szenzorfúzió révén az inerciális navigáció nem csupán egy önálló rendszer, hanem egy rendkívül sokoldalú és robusztus platform, amely képes a legkülönfélébb navigációs kihívásokra választ adni, kombinálva a különböző szenzorok erősségeit és kiküszöbölve gyengeségeiket.
Az inerciális irányítás alkalmazási területei

Az inerciális irányítás rendkívüli sokoldalúságának és függetlenségének köszönhetően számos iparágban és alkalmazási területen alapvető fontosságúvá vált. A katonai céloktól a mindennapi fogyasztói elektronikáig, az INS rendszerek széles spektrumon nyújtanak megbízható navigációs és mozgásérzékelési megoldásokat.
Légiközlekedés
A repülőgépek navigációjában az inerciális rendszerek kulcsfontosságúak. Mind a polgári, mind a katonai repülőgépek fedélzetén megtalálhatók, ahol pontosan meghatározzák a gép pozícióját, sebességét és orientációját. Ez elengedhetetlen a repülési útvonal tartásához, a pilótafülke műszereinek működéséhez, az automata pilótának és a leszállási rendszereknek. A modern utasszállító repülőgépeken általában több, redundáns INS rendszer működik, gyakran GPS-szel kombinálva, hogy a legnagyobb biztonságot és pontosságot garantálják.
Tengerészet
A hajók és különösen a tengeralattjárók navigációjában az inerciális rendszerek nélkülözhetetlenek. A tengeralattjárók hosszú ideig víz alatt tartózkodnak, ahol a GPS-jelek nem érhetők el. Az INS lehetővé teszi számukra, hogy pontosan kövessék pozíciójukat és irányukat a mélyben. A felszíni hajókon is használják őket, különösen a dinamikus pozícionáló rendszerekben, amelyek a hajót egy adott pozícióban tartják a tengeren, például olajfúró platformok közelében.
Űrrepülés
Az űrjárművek navigációjában az inerciális rendszerek a legfontosabbak. A rakéták indításától az űrhajók pályára állásáig, a műholdak orientációjának stabilizálásáig és a bolygóközi küldetések navigálásáig az INS biztosítja a pontos mozgáskövetést. A Holdra szállás során az Apollo-programban használt inerciális rendszerek mérföldkövet jelentettek a technológia fejlődésében, lehetővé téve az emberiség számára, hogy elhagyja a Földet és visszatérjen.
Autonóm járművek és ADAS
Az önvezető autók és a fejlett vezetőtámogató rendszerek (ADAS – Advanced Driver-Assistance Systems) fejlesztésében az inerciális navigáció központi szerepet játszik. A jármű pozíciójának, sebességének és orientációjának valós idejű, rendkívül pontos ismerete elengedhetetlen a biztonságos és megbízható autonóm vezetéshez. Az INS rendszereket gyakran kombinálják GPS-szel, radarral, lidarral és kamerákkal egy komplex szenzorfúziós architektúrában, amely ellenállóvá teszi a navigációt a GPS-jelvesztéssel szemben, és nagy pontosságú helymeghatározást biztosít a sűrű városi környezetben is.
„Az autonóm járművek forradalmát az inerciális szenzorok és a mesterséges intelligencia által vezérelt szenzorfúzió tette lehetővé, melyek együttesen biztosítják a valós idejű, milliméter pontos pozíció- és orientációmeghatározást.”
Robotika
A robotok, legyenek azok ipari robotkarok, mobil robotok vagy drónok, szintén támaszkodnak az inerciális szenzorokra a mozgásuk és orientációjuk szabályozásában. A robotkarok precíz pozícionálásához, a mobil robotok beltéri navigációjához és a drónok stabil repüléséhez az IMU adatai elengedhetetlenek. A SLAM (Simultaneous Localization and Mapping) algoritmusok gyakran integrálják az IMU adatait a kamerák és lézerek adataival a robusztus helymeghatározás és térképezés érdekében.
Felmérés és térképezés
A geodéziai felmérésekben, a térképezésben és a mobil leképező rendszerekben (Mobile Mapping Systems – MMS) az inerciális rendszerek precíz pozíció- és orientációadatokat szolgáltatnak a lézerek, kamerák és egyéb szenzorok számára. Ez lehetővé teszi a nagy pontosságú 3D-s modellek és térképek létrehozását, még mozgó platformokról is, például autókra vagy repülőgépekre szerelve.
Fogyasztói elektronika
A MEMS alapú inerciális szenzorok elterjedésével az inerciális irányítás bekerült a mindennapi életünkbe. Okostelefonokban giroszkópok és gyorsulásmérők teszik lehetővé a képernyő automatikus elforgatását, a játékok irányítását, a lépésszámlálást és a kiterjesztett valóság (AR) alkalmazásokat. Virtuális valóság (VR) és kiterjesztett valóság (AR) headsetekben biztosítják a fejmozgás pontos követését, ami elengedhetetlen a magával ragadó élményhez. Sportórákban és fitneszkarkötőkben a mozgás elemzésére és a teljesítmény mérésére használják.
Orvosi alkalmazások
Az orvostudományban az inerciális szenzorokat a mozgásanalízisben, a rehabilitációban és a sebészeti navigációban alkalmazzák. Segítségükkel pontosan mérhető a páciensek mozgástartománya, az ízületek elfordulása, vagy éppen a tremor mértéke. A sebészetben a műszerek pontos pozícionálásához és a minimálisan invazív beavatkozások irányításához nyújtanak segítséget.
Energetika és ipar
Az olaj- és gáziparban az inerciális rendszereket a fúrófejek pontos irányítására használják, hogy a fúrások a kívánt mélységbe és irányba haladjanak. Az ipari automatizálásban és a gyártásban a gépek és robotok mozgásának felügyeletére és vezérlésére szolgálnak, biztosítva a precíz működést és a termelékenységet.
Ez a széles körű alkalmazhatóság mutatja, hogy az inerciális irányítás milyen alapvető technológiává vált a modern világban, lehetővé téve a pontos mozgáskövetést és navigációt a legkülönfélébb környezetekben és feladatokhoz.
Az inerciális irányítás előnyei és hátrányai
Mint minden technológiának, az inerciális irányításnak is megvannak a maga erősségei és gyengeségei. Ezek megértése alapvető fontosságú a megfelelő navigációs megoldás kiválasztásához egy adott alkalmazáshoz.
Előnyök
Az inerciális rendszerek egyik legkiemelkedőbb előnye a függetlenség a külső jelektől. Ez azt jelenti, hogy az INS képes működni olyan környezetekben is, ahol a GPS, a rádiójelek vagy más külső referenciák nem elérhetők vagy megbízhatatlanok. Ilyenek például a víz alatti környezetek, alagutak, sűrű városi kanyonok, épületek belseje vagy a világűr. Ez a függetlenség teszi őket ideálissá katonai és kritikus infrastruktúrákban történő alkalmazásra, ahol a jelzavarás vagy a szándékos blokkolás kockázata fennáll.
Az INS rendszerek magas frissítési frekvenciával szolgáltatnak adatokat, jellemzően több száz, akár több ezer Hertz-cel. Ez rendkívül részletes és sima mozgási információt biztosít, ami elengedhetetlen a dinamikus rendszerek, például robotok, drónok vagy önvezető autók pontos vezérléséhez. Ezzel szemben a GPS tipikusan csak 1-10 Hz-es frissítési rátával működik.
Az inerciális rendszerek azonnali hozzáférést biztosítanak az orientációs adatokhoz (roll, pitch, yaw), valamint a gyorsulás és szögsebesség pillanatnyi értékeihez. Ez az információ kritikus a stabilizáláshoz, a vezérléshez és a pontos mozgásanalízishez, amit a GPS önmagában nem képes szolgáltatni.
Mivel az INS rendszerek passzívan működnek, nem sugároznak ki jeleket, ami lopakodó képességet biztosít számukra, és nem fedik fel a felhasználó pozícióját. Ez különösen fontos katonai alkalmazásokban.
Hátrányok
Az inerciális irányítás legnagyobb hátránya a már említett drift, azaz a hibák felhalmozódása az idő múlásával. A szenzorok zajai és biasai, valamint az integrációs hibák miatt a pozíció-, sebesség- és orientációbecslések pontossága folyamatosan romlik. Egy önálló INS rendszer csak korlátozott ideig képes elfogadható pontossággal működni, mielőtt jelentős eltéréseket mutatna a valóságtól.
A kezdeti állapot (alignálás) pontossága kulcsfontosságú. Bármilyen hiba a rendszer inicializálásakor azonnal beépül, és tovább súlyosbítja a driftet. Az alignálás folyamata időt vehet igénybe, különösen, ha nagy pontosságú rendszerekről van szó, amelyek a Föld forgását használják referenciaként.
A nagy pontosságú inerciális szenzorok, mint például az optikai giroszkópok vagy a lézergiroszkópok, nagyon drágák lehetnek. Bár a MEMS szenzorok olcsók, pontosságuk alacsonyabb, és gyorsabban driftelnek. Az alkalmazási területtől függően a költség jelentős korlátot jelenthet.
Az inerciális rendszerek érzékenyek a szenzorok kalibrációjára és a hőmérséklet-ingadozásokra. A szenzorok karakterisztikája változhat a hőmérséklet függvényében, ami további hibákat okozhat. Folyamatos kalibrációra és hőmérséklet-kompenzációra van szükség a stabil teljesítmény fenntartásához.
Ezek a hátrányok ellenére, a szenzorfúzió, különösen a GPS-szel és a Kalman-szűrővel, képes minimalizálni a drift problémáját, kihasználva az inerciális rendszerek előnyeit, miközben kompenzálja a gyengeségeiket. Ez a hibrid megközelítés a modern navigáció standardjává vált.
A jövőbeli fejlesztések és trendek az inerciális irányításban
Az inerciális irányítás technológiája folyamatosan fejlődik, és számos ígéretes trend rajzolódik ki a horizonton, amelyek tovább növelik a rendszerek pontosságát, megbízhatóságát és alkalmazhatóságát.
Miniaturizálás és költségcsökkentés
A MEMS technológia fejlődésével az inerciális szenzorok mérete és költsége drámaian csökkent. Ez a trend várhatóan folytatódik, lehetővé téve az INS rendszerek még szélesebb körű integrálását a kisebb eszközökbe, például viselhető elektronikába, orvosi implantátumokba és még kisebb drónokba. A cél a „navigáció mindenhol” elvének megvalósítása, ahol minden eszköz képes pontosan meghatározni a saját pozícióját és orientációját.
Pontosság növelése és drift csökkentése
A kutatás-fejlesztés egyik fő iránya a szenzorok inherens pontosságának javítása és a drift minimalizálása. Ez magában foglalja a MEMS szenzorok gyártási folyamatainak finomítását, új anyagok és elrendezések bevezetését, valamint a belső kalibrációs és kompenzációs algoritmusok fejlesztését. Az optikai giroszkópok területén is folynak fejlesztések, amelyek célja a pontosság megőrzése mellett a méret és költség csökkentése, például a szilícium-fotonikai integráció révén.
Fejlettebb szenzorfúziós algoritmusok és mesterséges intelligencia
A Kalman-szűrő továbbra is alapvető marad, de a jövőben várhatóan megjelennek a még kifinomultabb adaptív szűrőalgoritmusok, amelyek képesek valós időben alkalmazkodni a környezeti változásokhoz és a szenzorok teljesítményének romlásához. A mesterséges intelligencia (AI) és a gépi tanulás (Machine Learning – ML) egyre nagyobb szerepet kap a szenzorfúzióban. Az AI képes lehet azonosítani a komplex hibamintákat, előre jelezni a driftet, és optimalizálni a szenzorok közötti súlyozást. Ezenkívül az AI segíthet a környezeti szenzorok (kamerák, lidar) adatainak értelmezésében, ami még robusztusabb és pontosabb navigációt eredményez.
Kvantum-inerciális szenzorok
A távolabbi jövőben a kvantum-inerciális szenzorok ígérnek forradalmi áttörést. Ezek a szenzorok atomok kvantummechanikai tulajdonságait használják fel a gyorsulás és a forgás rendkívül pontos mérésére. Például az atomi interferométerek vagy a hideg atom giroszkópok elméletileg nagyságrendekkel pontosabbak lehetnek a jelenlegi optikai vagy MEMS szenzoroknál, gyakorlatilag driftmentes navigációt ígérve. Bár ezek a technológiák még kutatási fázisban vannak, potenciáljuk hatalmas a jövőbeli navigációs rendszerek számára, különösen a hosszú távú űrrepülésben vagy a rendkívül precíz katonai alkalmazásokban.
Integráció más technológiákkal
Az inerciális rendszerek egyre szorosabban integrálódnak más navigációs és érzékelési technológiákkal, mint például a 5G/6G hálózatok helymeghatározó képességei, a UWB (Ultra-Wideband) alapú beltéri pozícionálás, vagy a biomechanikai szenzorok. Ez a konvergencia egy átfogó, mindenütt jelenlévő navigációs ökoszisztémát hoz létre, amely képes zökkenőmentesen váltani a különböző technológiák között a környezeti feltételek és a pontossági igények függvényében.
Az inerciális irányítás tehát továbbra is dinamikusan fejlődik, és alapvető pillére marad a modern navigációnak és mozgásérzékelésnek. A folyamatos innovációk révén egyre pontosabbá, kisebbé, olcsóbbá és intelligensebbé válnak ezek a rendszerek, megnyitva az utat új alkalmazások és képességek előtt, amelyek ma még talán elképzelhetetlennek tűnnek.







