
Az emberiség története során a repülés mindig is az egyik legősibb és legmeghatározóbb álma volt. A madarak szárnyalásának megfigyelése inspirálta az első gondolatokat arról, hogyan lehetne leküzdeni a gravitációt és felemelkedni az égbe. Ebből a mélyen gyökerező vágyból született meg az ornitopter fogalma, egy olyan repülő szerkezet, amely a madarak és rovarok természetes mozgását, a szárnycsapásos repülést utánozza. Ez a mechanikus csoda nem csupán mérnöki kihívás, hanem a bionika, az aerodinamika és a robotika metszéspontján álló, lenyűgöző technológiai vívmány, amely évszázadok óta foglalkoztatja a feltalálók és tudósok képzeletét.
A merevszárnyú repülőgépek és a helikopterek uralják a modern égboltot, az ornitopter továbbra is egy izgalmas alternatívát vagy kiegészítő utat kínál a repüléstechnikában. Különleges mozgása, csendes működési potenciálja és a természettel való harmonikusabb illeszkedése miatt számos kutatási és fejlesztési területen ígéretes jövő előtt áll. Azonban az ember által épített ornitopterek megalkotása rendkívüli kihívásokat rejt, hiszen a természet milliós évek alatt tökéletesített mechanizmusát utánozni, majd gépesíteni, rendkívüli mérnöki precizitást és innovációt igényel. Cikkünkben mélyrehatóan vizsgáljuk meg az ornitopterek világát: mit jelentenek, hogyan működnek, milyen történelmi utat jártak be, és milyen jövő vár rájuk a modern technológia korában.
Az ornitopter fogalma és etimológiája
Az ornitopter szó a görög nyelvből származik, és két részből tevődik össze: az „ornithos” (ὄρνιθος), ami madarat jelent, és a „pteron” (πτερόν), ami szárnyat. Szó szerinti fordításban tehát „madárszárnyú”-ként értelmezhető. Ez a megnevezés tökéletesen tükrözi a szerkezet alapvető működési elvét: a repüléshez szükséges felhajtóerőt és tolóerőt a szárnyak csapkodó mozgása generálja, akárcsak a madarak vagy a rovarok esetében. Ezzel szemben a hagyományos repülőgépek merev szárnyakkal rendelkeznek, amelyek a levegőhöz viszonyított mozgásuk révén állítják elő a felhajtóerőt, és külön tolóerő-generáló eszközökkel (propeller, sugárhajtómű) biztosítják az előrehaladást.
Az ornitopter tehát egy olyan repülőgép, amely a levegőben való tartózkodáshoz és mozgáshoz a szárnyainak dinamikus, csapkodó mozgását használja. Ez a mozgás gyakran magában foglalja a szárnyak alakjának és dőlésszögének változtatását is a csapás különböző fázisaiban, hogy optimalizálja az aerodinamikai hatékonyságot. A koncepció gyökerei mélyen a történelemben vannak, egészen az első emberi repülési kísérletekig nyúlnak vissza, amelyek során az emberek a természetet, különösen a madarak repülését próbálták utánozni. A fogalom nem csupán egy technikai leírást takar, hanem egyben egy álmot, egy kihívást és egy folyamatosan fejlődő tudományágat is jelent.
A repülés ősi álma és az ornitopter
Az emberi civilizáció hajnalától fogva a repülés képessége misztikus és inspiráló erővel hatott az emberi képzeletre. Az égen szárnyaló madarak, a könnyedén mozgó rovarok látványa évezredek óta foglalkoztatja az emberiséget, és arra ösztönözte, hogy maga is felemelkedjen a földről. Az ókori mítoszok, mint például Ikarusz és Daidalosz története, már a repülés vágyát és a vele járó veszélyeket is megfogalmazták. Ezek a történetek nem csupán fantáziák voltak, hanem a megfigyelésen alapuló, kezdetleges aerodinamikai elgondolások első megnyilvánulásai is.
A repülés iránti vágy nem merült ki a mítoszokban. A középkorban és a reneszánsz idején számos feltaláló és gondolkodó kísérletezett a mechanikus repülés gondolatával. Ezeknek a korai kísérleteknek a középpontjában szinte mindig a madárrepülés utánzása állt. Azt feltételezték, hogy ha az ember képes reprodukálni a madarak szárnyának mozgását, akkor maga is repülhet. Ez a logikusnak tűnő, de rendkívül komplex feladat vezetett az első ornitopter tervek és modellek megszületéséhez. A korabeli technológiai korlátok és az aerodinamikai tudás hiánya miatt ezek a korai tervek többnyire kudarcot vallottak, de alapvető fontosságúak voltak a későbbi fejlesztések szempontjából.
Leonardo da Vinci és az ornitopter tervek
Amikor az ornitopterek történetéről beszélünk, elkerülhetetlen, hogy megemlítsük Leonardo da Vinci nevét. A reneszánsz polihisztora, a művész, tudós és feltaláló, az egyik legkorábbi és legátfogóbb módon foglalkozott a repülés mechanikájával. Részletes megfigyeléseket végzett a madarak anatómiájáról és repülési technikájáról, aprólékosan tanulmányozva a szárnyak formáját, mozgását és az általuk generált erőket. Ezeket a megfigyeléseket jegyzetfüzeteiben dokumentálta, amelyeket ma is csodálattal tekintünk meg.
Leonardo számos ornitopter tervet készített, amelyek közül a leghíresebbek a „repülőgép” és a „helikoptermadár” vázlatai. Tervei gyakran tartalmaztak emberi erővel hajtott mechanizmusokat, ahol a pilóta lábbal és karral mozgatta volna a szárnyakat. Bár elképzelései a kor technológiai szintjén még nem voltak megvalósíthatók – főként a megfelelő erőforrás és a könnyű, mégis erős anyagok hiánya miatt –, rajzai és elméleti munkája évszázadokkal megelőzte korát. Leonardo da Vinci nem csupán rajzolta az ornitoptereket, hanem megpróbálta megérteni a mögöttes fizikai elveket is, ezzel lefektetve a modern aerodinamika alapjait. Munkája máig inspirálja a mérnököket és a kutatókat, akik a szárnycsapásos repülés rejtelmeit kutatják.
„Miután a szárnyak elegendő erőt gyűjtöttek, a gép felemelkedhet a levegőbe.”
A szárnycsapásos repülés elmélete: aerodinamikai alapok

Az ornitopterek működésének megértéséhez elengedhetetlen a szárnycsapásos repülés alapvető aerodinamikai elveinek ismerete. A merevszárnyú repülőgépek esetében a felhajtóerő és a tolóerő különálló mechanizmusokból származik, addig a szárnycsapásos repülésben a szárnyak mozgása egyidejűleg generálja mindkét erőt. Ez a komplex folyamat teszi lehetővé a madarak és rovarok számára a hihetetlen manőverezőképességet és az energiahatékony repülést.
Hogyan repülnek a madarak és rovarok?
A madarak és rovarok repülése négy alapvető erő egyensúlyán múlik: a felhajtóerő, a tolóerő, a gravitáció (vagy súly) és a légellenállás. A felhajtóerő a gravitáció ellen hat, a tolóerő pedig a légellenállás ellen, előre mozgatva a testet. A szárnycsapásos repülés során a szárnyak nem csupán felfelé és lefelé mozognak, hanem egy komplex, háromdimenziós mozgást végeznek, amely magában foglalja a csavarodást, a dőlést és az előre-hátra irányú elmozdulást is. Ez a dinamikus mozgás lehetővé teszi, hogy a szárnyak a levegőben „evezzenek”, folyamatosan új felhajtóerőt és tolóerőt generálva.
A szárnycsapás ciklusának két fő fázisa van: a lefelé irányuló csapás (downstroke) és a felfelé irányuló csapás (upstroke). A lefelé irányuló csapás során a szárnyak erőteljesen lefelé és kissé előre mozognak, nagy felhajtóerőt és tolóerőt generálva. Ekkor a szárnyprofil úgy áll be, hogy a levegőt lefelé és hátrafelé terelje, ezzel reakcióerőt váltva ki, ami a madarat vagy rovart felfelé és előre löki. A felfelé irányuló csapás során a szárnyak összehúzódnak, elfordulnak és felfelé mozognak, minimalizálva a légellenállást, miközben fenntartják a felhajtóerő egy részét. Ez a fázis kevésbé energiaigényes, és előkészíti a következő lefelé irányuló csapást.
A szárnyprofil dinamikája
A merevszárnyú repülőgépek szárnyprofilja általában állandó alakú. A madarak és rovarok, valamint az ornitopterek szárnyai azonban rugalmasak és deformálódnak a mozgás során. Ez a dinamikus alakváltozás kulcsfontosságú az aerodinamikai hatékonyság szempontjából. A szárnyak képesek megváltoztatni a dőlésszögüket (angle of attack), görbületüket (camber) és felületüket a csapás különböző fázisaiban. Ez lehetővé teszi számukra, hogy optimalizálják az erők generálását, például nagyobb felhajtóerőt hozzanak létre a lefelé irányuló csapás során, és minimalizálják a légellenállást a felfelé irányuló csapás alatt.
A szárnyak rugalmassága és az ízületek komplex rendszere (a madarak esetében) lehetővé teszi a finomhangolt aerodinamikai vezérlést. A szárnyak hegyénél gyakran megfigyelhető a „vortex” vagy örvényképződés, amely további felhajtóerőt generálhat, különösen kisebb méretű repülő élőlényeknél, mint például a rovarok. Az ornitopter tervezése során a mérnököknek ezt a komplex dinamikát kell mechanikusan reprodukálniuk, ami óriási kihívást jelent az anyagválasztás, a mechanizmusok tervezése és a vezérlőrendszerek fejlesztése terén.
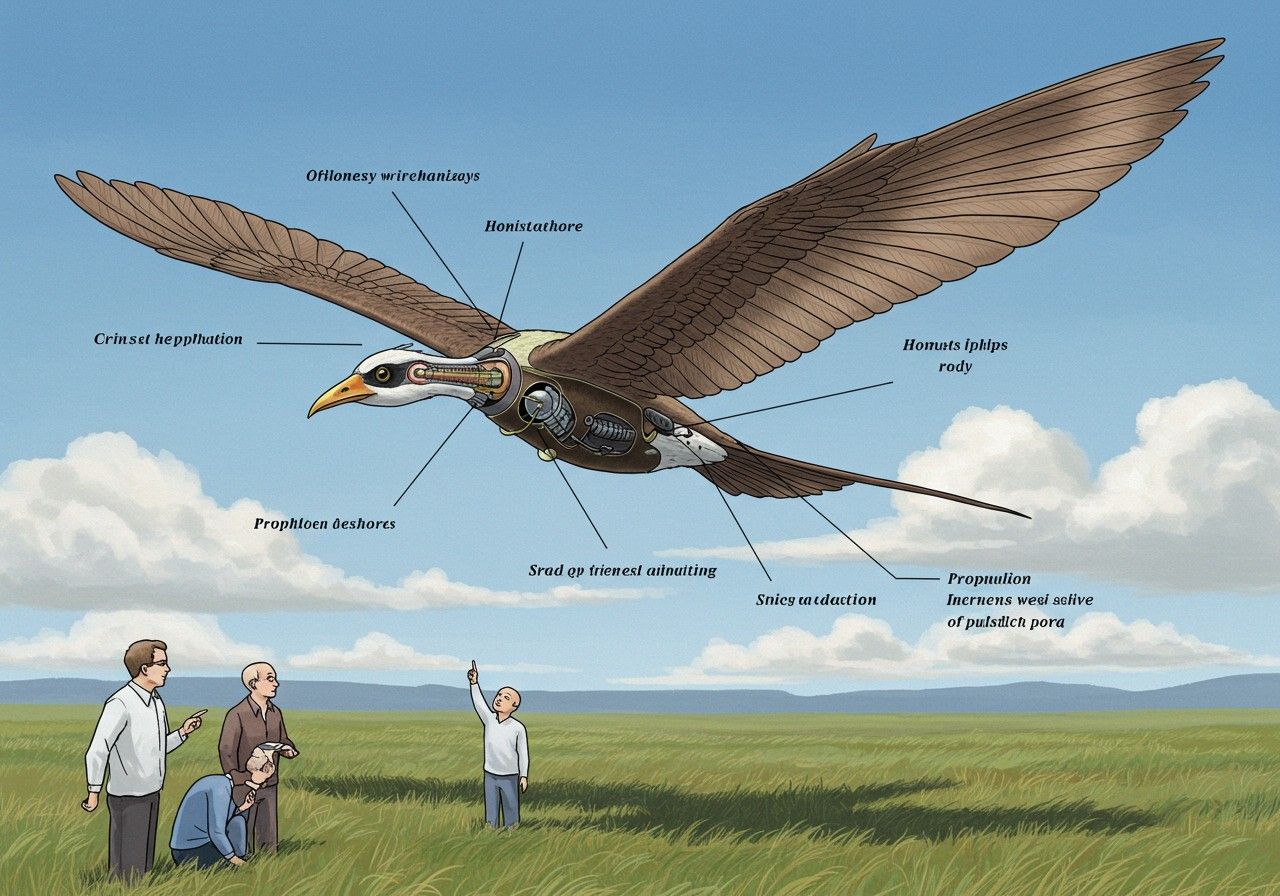
Az ornitopter szerkezeti elemei és működési elve
Egy működőképes ornitopter megépítése rendkívül komplex feladat, amely számos precízen megtervezett és összehangolt alkatrészből áll. A természetes szárnycsapásos repülés bonyolultságát mechanikus úton reprodukálni a modern mérnöki tudomány egyik legérdekesebb kihívása. Vizsgáljuk meg a legfontosabb szerkezeti elemeket és azok működési elvét részletesebben.
Vázszerkezet
Az ornitopter vázának elsődleges feladata, hogy könnyű, de erős alapot biztosítson az összes többi alkatrész számára. A súly minimalizálása kulcsfontosságú, hiszen minden extra gramm növeli a szükséges felhajtóerőt, és csökkenti a hatékonyságot. Ezért gyakran használnak könnyű és nagy szilárdságú anyagokat, mint például a szénszálas kompozitok, üvegszálas anyagok, balsafa vagy speciális alumíniumötvözetek. A váz kialakítása befolyásolja a szerkezet aerodinamikai ellenállását és stabilitását is. A modern ornitopterek tervezői gyakran alkalmaznak bionikus megközelítést, a madarak csontvázának vagy a rovarok külső vázának struktúráját utánozva, hogy optimalizálják a súly-erő arányt.
Szárnyak
Az ornitopterek szárnyai kétségkívül a legkritikusabb alkatrészek. Ezek felelősek a felhajtóerő és a tolóerő generálásáért. A szárnyak anyaga általában könnyű, rugalmas fólia vagy szövet, amelyet egy merev, de könnyű keretre feszítenek ki. Anyaguk lehet Mylar, Kapton, szilikon alapú polimerek, vagy akár speciálisan kezelt textilanyagok. A rugalmasság alapvető fontosságú, mivel a szárnyaknak deformálódniuk kell a csapás különböző fázisaiban, hogy a legoptimálisabb aerodinamikai profilt vegyék fel. A szárnyak alakja és mérete is kritikus, és a tervezett repülési sebességhez, a terheléshez és a meghajtórendszerhez igazodik. A szárnyak csúcsa gyakran vékonyabb és rugalmasabb, mint a töve, lehetővé téve a hatékony örvényképződést és a tolóerő optimalizálását.
Meghajtórendszer
A meghajtórendszer feladata, hogy a motor forgó mozgását a szárnyak komplex, csapkodó mozgásává alakítsa át. Ez egy precíziós mechanikai áttétel és karrendszer segítségével valósul meg. A motor általában egy kisméretű, nagy teljesítményű elektromos motor, különösen a mikro- és miniatűr ornitopterek esetében. Korábbi, nagyobb modelleknél belső égésű motorokat is alkalmaztak, de ezek súlya, zajszintje és komplexitása hátrányos. Az elektromos motorok csendesebbek, könnyebbek és könnyebben vezérelhetők, ami ideálissá teszi őket a modern ornitopterek számára.
Az áttételi mechanizmus rendkívül fontos. Ez gyakran egy sor fogaskereket és bütykös tengelyt foglal magában, amelyek a motor forgását periodikus fel-le mozgássá alakítják, miközben a szárnyak dőlésszögét és csavarodását is szabályozzák. A mechanizmusnak nagy nyomatékot kell átadnia, miközben minimalizálja a súrlódást és a súlyt. A precíz időzítés és szinkronizáció elengedhetetlen a hatékony és stabil repüléshez.
Vezérlés és stabilizálás
Az ornitopterek irányítása és stabilizálása az egyik legnagyobb mérnöki kihívás. A szárnycsapásos repülés inherently instabil, és a legkisebb légáramlat is könnyen kibillentheti a szerkezetet. A modern ornitopterek ezért gyakran alkalmaznak fejlett elektronikus vezérlőrendszereket, amelyek giroszkópok, gyorsulásmérők és egyéb szenzorok segítségével folyamatosan figyelik a gép helyzetét és mozgását. Ezek az adatok alapján a fedélzeti számítógép valós időben korrigálja a szárnyak mozgását, a csapások frekvenciáját és amplitúdóját, vagy akár a szárnyak dőlésszögét a repülés stabilizálása és az irány változtatása érdekében.
A vezérlés történhet a szárnyak mozgásának aszimmetrikus változtatásával (pl. egyik szárny erősebben csap, mint a másik), vagy apró vezérlőfelületek (pl. farokfelületek) alkalmazásával. A mikro-ornitopterek esetében gyakran passzív stabilitási elveket is alkalmaznak, ahol a súlypont és az aerodinamikai középpont elhelyezése segít a stabilitás fenntartásában, minimalizálva az aktív vezérlés szükségességét.
Energiaforrás
Az energiaforrás a motor működéséhez szükséges energiát biztosítja. A legtöbb modern ornitopter, különösen a kisebb modellek, újratölthető lítium-polimer (LiPo) akkumulátorokat használnak. Ezek az akkumulátorok viszonylag nagy energiasűrűséggel rendelkeznek a súlyukhoz képest, de a repülési időt még mindig korlátozzák. A kutatások folynak az energiahatékonyság növelésére, valamint alternatív energiaforrások, például napelemek vagy üzemanyagcellák integrálására, amelyek meghosszabbíthatnák a repülési időt és hatótávolságot. A nagyobb ornitopterek esetében, ahol a súly kevésbé kritikus, belső égésű motorok is szóba jöhetnek, de ezek komplexitásuk és zajszintjük miatt ritkábban kerülnek alkalmazásra.
| Alkatrész | Fő funkció | Jellemző anyagok/technológiák |
|---|---|---|
| Vázszerkezet | Könnyű, erős alap biztosítása | Szénszálas kompozit, üvegszál, balsafa, alumíniumötvözetek |
| Szárnyak | Felhajtóerő és tolóerő generálása | Mylar, Kapton, szilikon polimerek, speciális textíliák |
| Meghajtórendszer | Motor forgó mozgásának szárnycsapássá alakítása | Elektromos motor, fogaskerekek, bütykös tengelyek, karrendszer |
| Vezérlés és stabilizálás | Helyzet és irány szabályozása | Giroszkópok, gyorsulásmérők, fedélzeti számítógép, vezérlőfelületek |
| Energiaforrás | Motor energiaellátása | Lítium-polimer akkumulátorok (LiPo) |
A kihívások és a technológiai korlátok
Az ornitopterek koncepciója rendkívül vonzó, de a gyakorlati megvalósításuk során számos jelentős technológiai és mérnöki kihívással kell szembenézni. Ezek a korlátok magyarázzák, hogy miért nem váltak még mainstream repülő szerkezetekké, és miért maradnak a kutatás és a speciális alkalmazások területén.
Hatékonyság
Az egyik legnagyobb kihívás az energiahatékonyság. Bár a madarak és rovarok rendkívül hatékonyan repülnek, az ő biológiai rendszereik milliós évek alatt optimalizálódtak. Egy mechanikus rendszer, amely utánozza ezt a komplex mozgást, jelentős energiaveszteséggel jár a súrlódás, a mechanikai veszteségek és a nem optimális aerodinamikai beállítások miatt. A merevszárnyú repülőgépek állandó szárnyprofilja és a folyamatos tolóerő-generálás gyakran egyszerűbb és energiahatékonyabb megoldást kínál nagyobb sebességeknél és távolságoknál.
A szárnycsapásos repülés a kisebb méreteknél, alacsony sebességeknél és a függőleges fel- és leszállásnál mutathat előnyöket, de a nagyobb, emberi szállításra alkalmas ornitopterek esetében a szükséges energia és a szerkezeti súly aránya rendkívül kedvezőtlen. A jelenlegi technológia mellett nehéz olyan rendszert építeni, amely képes lenne elegendő hasznos terhet felemelni és hosszabb ideig a levegőben maradni, miközben versenyképes lenne a hagyományos repülőeszközökkel.
Stabilitás és irányíthatóság
A szárnycsapásos repülés inherent módon instabil. A szárnyak folyamatos mozgása dinamikus változásokat okoz az aerodinamikai erőkben, ami megnehezíti a stabil repülés fenntartását és az irány pontos szabályozását. A madarak és rovarok idegrendszere és izomzata rendkívül gyorsan és precízen képes reagálni ezekre a változásokra, folyamatosan korrigálva a szárnyak mozgását. Egy mechanikus rendszernek ehhez hasonló, valós idejű vezérlési képességekkel kell rendelkeznie, ami fejlett szenzorokat, gyors feldolgozóegységeket és kifinomult algoritmusokat igényel.
A széllökések és turbulenciák különösen nagy kihívást jelentenek az ornitopterek számára. A stabil repüléshez gyakran aktív vezérlésre van szükség, ami további súlyt és komplexitást ad a rendszerhez. A mikro-ornitopterek esetében a kis méret miatt a légáramlások még inkább befolyásolják a repülési stabilitást, ami precízebb szenzorokat és vezérlést tesz szükségessé.
Zajszint
Bár sokan azt gondolnák, hogy az ornitopterek csendesebbek, mint a propelleres vagy sugárhajtású gépek, a valóságban a szárnyak gyors csapkodása jelentős zajt generálhat, különösen nagyobb méretekben. A szárnyak levegővel való érintkezése, a légörvények és a mechanikai alkatrészek mozgása mind hozzájárulnak a zajhoz. A természetes repülő élőlények zajszintje minimális, de egy mechanikus rendszer esetében a zajcsökkentés további mérnöki feladatot jelent, ami bonyolíthatja a szerkezetet és növelheti a súlyát.
Skálázhatóság
A szárnycsapásos repülés aerodinamikai elvei eltérően viselkednek különböző méretekben. Ami hatékony egy rovarnál, az nem feltétlenül az egy madárnál, és még kevésbé egy ember méretű gépnél. A kisebb méretekben (mikro-ornitopterek) a viszkózus erők dominálnak, míg nagyobb méretekben az inerciális erők válnak jelentősebbé. Ez azt jelenti, hogy egy működőképes mikro-ornitopter tervezési elvei nem skálázhatók egyszerűen fel egy nagyobb méretű ornitopterre. Minden méretosztályhoz egyedi aerodinamikai és mechanikai optimalizálásra van szükség, ami lassítja a fejlesztést és növeli a költségeket.
Ezek a kihívások nem leküzdhetetlenek, de megkövetelik a folyamatos kutatást és fejlesztést az anyagtudomány, az aerodinamika, a robotika és a vezérléstechnika területén. A jövőbeli áttörések azonban ígéretesek lehetnek az ornitopterek szélesebb körű alkalmazásában.
Az ornitopterek történetének mérföldkövei a 20. és 21. században
Bár Leonardo da Vinci már a 15. században álmodott az ornitopterekről, a technológiai fejlődés csak jóval később tette lehetővé a gyakorlati kísérleteket. A 20. század hozta el az első valós, működőképes modelleket, és a 21. században váltak igazán kifinomulttá, különösen a mikro-méretekben.
Korai kísérletek és úttörők
A 19. század végén és a 20. század elején, a repülés hőskorában, számos feltaláló fordult az ornitopterek felé. Lawrence Hargrave ausztrál mérnök az 1890-es években épített sikeres, gőzzel hajtott ornitopter modelleket, amelyek képesek voltak repülni. Bár ezek még nem voltak emberes gépek, bebizonyították a szárnycsapásos repülés alapvető megvalósíthatóságát.
Magyarországon is volt jelentős úttörője az ornitopter fejlesztésnek: Kálmán Tihamér (1884–1940) mérnök, repülőgép-tervező. Az 1920-as és 30-as években Kálmán Tihamér nevéhez fűződik az egyik legkomolyabb és leghatékonyabb emberi hajtású ornitopter kísérlet. Az általa tervezett és épített gép, a „Kálmán Tihamér I”, a pilóta láb- és karerejével hajtotta a szárnyakat, és bár nem ért el tartós repülést, elméleti munkája és kísérletei jelentősen hozzájárultak az aerodinamikai ismeretekhez és a szárnycsapásos repülés problémáinak mélyebb megértéséhez.
Az 1940-es és 50-es években a merevszárnyú repülőgépek és helikopterek gyors fejlődése háttérbe szorította az ornitopterek kutatását, de a lelkes feltalálók sosem adták fel. Többek között Alexander Lippisch, a német repülőgéptervező is foglalkozott ornitopter tervekkel.
Fejlődés a modern anyagok és elektronika megjelenésével
A 20. század második felében, különösen az 1970-es és 80-as évektől kezdve, az anyagtudomány és az elektronika forradalma új lendületet adott az ornitopter kutatásnak. A könnyű, de rendkívül erős kompozit anyagok, mint a szénszál és az üvegszál, lehetővé tették olyan szárnyak és vázszerkezetek építését, amelyek korábban elképzelhetetlenek voltak. Az elektronikus miniatürizálás, a mikrovezérlők és a szenzorok fejlődése pedig megnyitotta az utat a kifinomult vezérlőrendszerek előtt, amelyek képesek voltak kezelni a szárnycsapásos repülés inherens instabilitását.
Ekkor jelentek meg az első távirányítású, motorral hajtott ornitopter modellek, amelyek már viszonylag stabilan és irányíthatóan repültek. Ezek a modellek elsősorban hobbi célokat szolgáltak, de értékes tapasztalatokat biztosítottak a további fejlesztésekhez.
Mikro-ornitopterek (MAV – Micro Aerial Vehicles)
A 21. század elejének egyik legizgalmasabb fejlesztési iránya a mikro-ornitopterek (MAV-ok) megjelenése. Ezek a tenyérnyi méretű, vagy még kisebb szerkezetek a rovarok repülését utánozzák, és rendkívül ígéretesek a felderítés, megfigyelés és más speciális alkalmazások területén. Az egyik legismertebb példa a Festo cég által kifejlesztett BionicOpter, amely a szitakötő repülését utánozza, rendkívüli manőverezőképességgel és stabilitással. A MAV-ok fejlesztésében kulcsfontosságú a miniaturizálás, az energiahatékonyság és a fejlett autonóm vezérlés.
Emberes ornitopterek
Az emberes ornitopterek megvalósítása továbbra is a „Szent Grál” a repüléstechnikában. Néhány sikeres, de rövid ideig tartó repülésről számoltak be, például a Toronto Egyetem UTIAS (University of Toronto Institute for Aerospace Studies) csapata által kifejlesztett Snowbird nevű gép 2010-ben. Ez a gép emberi erővel hajtott ornitopter volt, amely több mint 19 másodpercig repült, és ezzel bekerült a Guinness Rekordok Könyvébe. Bár a repülés rövid volt, és speciális körülmények között zajlott (vontatásból indult), bebizonyította, hogy elvileg lehetséges az emberi erővel hajtott ornitopterrel való repülés. Ezek a projektek azonban inkább tudományos kísérletek, mintsem gyakorlati alkalmazások, és a fő céljuk a szárnycsapásos repülés aerodinamikájának mélyebb megértése.
„Az ornitopterek története a makacs kitartás és a mérnöki zsenialitás története, amely a természetet hívja segítségül a repülés meghódítására.”
Modern ornitopter alkalmazások és kutatási területek

Bár az ornitopterek még nem váltak általánosan elterjedt repülőeszközökké, a modern technológia és az innovatív kutatások révén számos ígéretes alkalmazási terület és fejlesztési irány rajzolódik ki számukra. Ezek a területek kihasználják az ornitopterek egyedi tulajdonságait, mint a csendes működés, a manőverezőképesség és a természetes megjelenés.
Katonai felderítés és megfigyelés
A mikro-ornitopterek (MAV-ok) különösen vonzóak a katonai és hírszerzési alkalmazások számára. Képesek észrevétlenül behatolni ellenséges területekre, mivel méretük, formájuk és mozgásuk hasonlít a madarakéhoz vagy rovarokéhoz. Ez megnehezíti a radarral való észlelésüket, és vizuálisan is könnyen összetéveszthetők a természetes élőlényekkel. Képesek lehetnek kis kamerákkal vagy szenzorokkal felszerelve valós idejű információkat gyűjteni anélkül, hogy gyanút keltenének. A csendes működésük tovább növeli az álcázás hatékonyságát.
Környezeti megfigyelés és kutatás
Az ornitopterek ideálisak lehetnek a vadon élő állatok megfigyelésére anélkül, hogy zavarnák őket. Egy hagyományos drón vagy helikopter zaja és megjelenése elriaszthatja az állatokat, míg egy ornitopter, amely egy madárhoz hasonlóan repül, sokkal kevésbé feltűnő. Ez lehetővé teszi a természetes viselkedés tanulmányozását, a populációk számlálását vagy a nehezen megközelíthető területek felmérését ökológiai szempontból. Például vulkánok kráterének vagy veszélyeztetett fajok élőhelyének vizsgálatára is alkalmasak lehetnek.
Kutatás és fejlesztés a bionika és repülési mechanika terén
Az ornitopterek fejlesztése önmagában is egy hatalmas kutatási terület. Segít jobban megérteni a természetes repülés bonyolult mechanizmusait, a madarak és rovarok aerodinamikai titkait. A bionika, azaz a biológiai rendszerek utánzása a mérnöki tervezésben, az ornitopterek esetében különösen hangsúlyos. Az ornitopterek kutatása hozzájárulhat az aerodinamikai elméletek finomításához, az új anyagok és vezérlőrendszerek fejlesztéséhez, amelyek más repüléstechnikai területeken is alkalmazhatók lehetnek.
Oktatás és hobbi
Az ornitopter modellek népszerűek az oktatásban és a hobbi körökben. Kiváló eszközök a repülés fizikai elveinek, az aerodinamikának és a mechanikai tervezésnek a bemutatására. A diákok és amatőr mérnökök számára izgalmas kihívást jelenthet egy saját, működőképes ornitopter megépítése, amely fejleszti a problémamegoldó képességet és a kreativitást. Kereskedelmi forgalomban is kaphatók kisebb, távirányítású ornitopter játékok, amelyek a szélesebb közönség számára is elérhetővé teszik ezt a különleges technológiát.
Jövőbeli potenciál: bolygóközi felderítés
Az ornitopterek jövőbeli alkalmazási lehetőségei a Földön túlra is kiterjedhetnek. A NASA és más űrügynökségek kutatják a szárnycsapásos repülés lehetőségét más bolygók légkörében, például a Marson vagy a Titánon. Ezeknek a bolygóknak a légköre ritkább vagy sűrűbb lehet, mint a Földé, ami eltérő aerodinamikai kihívásokat támaszt. Egy bolygóközi ornitopter képes lenne a felszín felett repülve feltérképezni a terepet, mintavételeket gyűjteni, és olyan területeket elérni, ahová egy rover nem jutna el, mindezt viszonylag alacsony energiafelhasználással és nagy manőverezőképességgel. A jelenlegi kutatások már vizsgálnak ilyen koncepciókat, például a Dragonfly nevű Titánra tervezett rotorkopter drónt, amelynek működési elve bizonyos szempontból hasonlít az ornitopterekhez.
Az ornitopter jövője: merre tart a fejlesztés?
Az ornitopterek fejlesztése egy folyamatosan fejlődő terület, ahol a tudomány és a mérnöki innováció szorosan összefonódik a természet inspirációjával. A jövőbeli áttörések kulcsfontosságúak lesznek ahhoz, hogy ezek a különleges repülő szerkezetek szélesebb körű alkalmazásra találjanak. Nézzük meg, melyek a legfontosabb fejlesztési irányok.
Anyagtudomány
Az ornitopterek hatékonyságának és teljesítményének növelése szempontjából az anyagtudomány kulcsfontosságú. A kutatók olyan anyagokat keresnek, amelyek még könnyebbek, erősebbek és rugalmasabbak. A nanokompozitok, az okos anyagok (pl. alakemlékező ötvözetek, piezoelektromos anyagok) és a biológiailag inspirált, öngyógyító anyagok forradalmasíthatják a szárnyak és a vázszerkezet tervezését. Ezek az anyagok lehetővé tehetik a szárnyak még finomabb, dinamikusabb alakváltozását, optimalizálva az aerodinamikai hatékonyságot a repülés minden fázisában, miközben csökkentik a súlyt és növelik a tartósságot.
Miniaturizálás és energiahatékonyság
A mikro-ornitopterek (MAV-ok) területén a miniaturizálás és az energiahatékonyság a legfőbb cél. A motorok, akkumulátorok és vezérlőelektronika méretének és súlyának további csökkentése, miközben nő a teljesítményük, alapvető fontosságú. A kutatások a mikro-elektromechanikai rendszerek (MEMS) és a szuperkondenzátorok felé is mutatnak, amelyek új lehetőségeket nyithatnak meg az energia tárolásában és felhasználásában. Az energiahatékonyság növelése nem csak a repülési időt hosszabbítja meg, hanem lehetővé teszi a kisebb, könnyebb energiaforrások használatát is.
Mesterséges intelligencia és autonóm vezérlés
Az autonóm repülés és a mesterséges intelligencia (AI) forradalmasíthatja az ornitopterek vezérlését. Az AI-alapú algoritmusok képesek lehetnek valós időben optimalizálni a szárnycsapásokat, alkalmazkodva a változó légköri viszonyokhoz és a repülési célokhoz. Az önálló döntéshozatal, a környezet érzékelése és a navigáció fejlesztése lehetővé teszi, hogy az ornitopterek emberi beavatkozás nélkül végezzenek komplex feladatokat. Ez különösen fontos a felderítési és megfigyelési alkalmazásoknál, ahol az operátorok számának minimalizálása kulcsfontosságú lehet.
Bionikus inspiráció
A jövő ornitopterei még inkább a természetet fogják utánozni. A bionikus tervezés nem csupán a szárnyak és a test formájára, hanem a belső szerkezetre és a vezérlési mechanizmusokra is kiterjed. A madarak és rovarok izomzatának, idegrendszerének és érzékszerveinek tanulmányozása új ötleteket adhat a hajtásrendszerek, a szenzorok és a vezérlőalgoritmusok fejlesztéséhez. Például a rovarok összetett szemei inspirálhatnak új, könnyű és hatékony vizuális szenzorokat az akadályok elkerülésére és a navigációra. A puha robotika terén elért fejlődés is lehetővé teheti a szárnyak még élethűbb, rugalmasabb és deformálhatóbb mozgását.
Az ornitopterek jövője tehát a multidiszciplináris kutatások metszéspontjában rejlik. Az anyagtudomány, a robotika, az AI és a bionika folyamatos fejlődése egyre közelebb hoz minket ahhoz, hogy a szárnycsapásos repülés ősi álma ne csak a természetben, hanem a technológia által is valósággá váljon, új és izgalmas lehetőségeket nyitva meg a repülés világában.
Összehasonlítás más repülő szerkezetekkel
Az ornitopterek egyedi működési elvük miatt jelentősen eltérnek a hagyományos repülő szerkezetektől. Fontos megvizsgálni ezeket a különbségeket, hogy jobban megértsük az ornitopterek helyét a repüléstechnikában, valamint előnyeiket és hátrányaikat.
Merevszárnyú repülőgépek
A merevszárnyú repülőgépek (pl. utasszállítók, vadászgépek) felhajtóereje a fix szárnyak és a levegő relatív mozgásából ered. A tolóerőt propellerek vagy sugárhajtóművek biztosítják. Fő előnyük a nagy sebesség, a hosszú hatótávolság és a nagy teherbírás. Hátrányuk, hogy folyamatos előrehaladó mozgásra van szükségük a felhajtóerő fenntartásához, ami hosszú kifutópályákat igényel a fel- és leszálláshoz. Ezen kívül zajosak és általában nem képesek helyben lebegni (hovering).
Az ornitopterek ezzel szemben képesek helyben lebegni, függőlegesen fel- és leszállni, és rendkívül agilisek lehetnek alacsony sebességeknél. Csendesebbek lehetnek a kisebb méretekben, és a természetes mozgásuk miatt kevésbé feltűnőek. Hátrányuk azonban a merevszárnyúakhoz képest a jóval alacsonyabb sebesség, a korlátozott hatótávolság és a kisebb teherbírás. Mechanikailag is sokkal komplexebbek.
Helikopterek
A helikopterek forgó szárnyakat (rotort) használnak a felhajtóerő és a tolóerő generálására. Képesek függőlegesen fel- és leszállni, helyben lebegni, és rendkívül manőverezhetők. Fő előnyük a rugalmasság a fel- és leszállási helyszínek kiválasztásában, valamint a pontos pozíciótartás. Hátrányuk a komplex mechanika, a magas üzemeltetési költségek, a jelentős zajszint és az alacsonyabb sebesség a merevszárnyúakhoz képest.
Az ornitopterek hasonlóan képesek a függőleges fel- és leszállásra, valamint a lebegésre, de ezt egy teljesen más elven teszik. Potenciálisan csendesebbek lehetnek, és a természetesebb megjelenésük miatt kevésbé feltűnőek. A helikopterekhez képest azonban az ornitopterek még nagyobb mechanikai komplexitással és alacsonyabb teherbírással rendelkeznek, és a vezérlésük is sokkal nehezebb. A helikopterek stabilabb repülést biztosítanak nagyobb méretekben.
Drónok (multirotoros UAV-k)
A modern drónok, különösen a multirotor elrendezésűek (pl. kvadkopterek), propellerekkel repülnek, és elektronikus stabilizációval képesek függőlegesen fel- és leszállni, valamint precízen lebegni. Fő előnyük a viszonylagos egyszerűség (mechanikailag), a könnyű vezérlés, az alacsony költség és a nagyfokú automatizálhatóság. Hátrányuk a korlátozott repülési idő (akkumulátor miatt), a zajosság és az, hogy a propellerek miatt könnyen észrevehetők.
Az ornitopterek a drónokkal szemben a lopakodó képességben és a természetes megjelenésben jeleskednek. A kisebb ornitopterek kevésbé zajosak lehetnek, és a mozgásuk miatt nehezebben azonosíthatók drónként. Azonban az ornitopterek fejlesztése sokkal drágább és bonyolultabb, a vezérlésük is komplexebb, és a repülési teljesítményük (sebesség, hatótáv) általában elmarad a drónoktól. Az ornitopterek niche szerepe éppen abban rejlik, hogy olyan környezetekben nyújthatnak előnyt, ahol a csendesség, az álcázás és a biológiai inspiráció kritikus tényező.
Összességében az ornitopterek nem feltétlenül a „jobb” vagy „rosszabb” kategóriába tartoznak, hanem egy alternatív megközelítést kínálnak a repüléshez. Erősségeik a speciális alkalmazásokban mutatkoznak meg, ahol a természetes mozgás, a csendesség és a manőverezőképesség felülmúlja a sebesség vagy a teherbírás igényét. A jövő valószínűleg a különböző repülési elvek hibrid megoldásait is hozhatja, ahol az ornitopter technológia más rendszerekkel kombinálva új képességeket nyit meg.
Etikai és társadalmi megfontolások
Az ornitopterek, különösen a mikro-méretű változatok, számos etikai és társadalmi kérdést vetnek fel, amelyekkel a technológia fejlődésével párhuzamosan foglalkozni kell. Mint minden új technológia esetében, itt is felmerülnek a lehetséges visszaélések és a társadalmi hatások kérdései.
Adatvédelem és megfigyelés
A mikro-ornitopterek (MAV-ok) egyik legnagyobb előnye a lopakodó képesség. Képesek észrevétlenül, madárnak vagy rovarnak álcázva megfigyelni környezetüket. Ez rendkívül hasznos lehet katonai vagy rendészeti célokra, de súlyos adatvédelmi aggályokat is felvet. Képesek lehetnek magánterületek felett repülni, embereket megfigyelni és információkat gyűjteni anélkül, hogy az érintettek tudnának róla. A drónok elterjedésével már most is komoly viták folynak az adatvédelemről és a megfigyelés hatáiról; az ornitopterek még nehezebben azonosíthatók, ami még nagyobb kihívást jelenthet a jogi szabályozás és a közbizalom szempontjából. Szükségesek olyan jogi keretek és etikai irányelvek, amelyek biztosítják ezen eszközök felelős használatát.
Környezeti hatások
Bár az ornitopterek csendesebbek lehetnek, mint más repülőeszközök, és potenciálisan kevesebb üzemanyagot fogyasztanak, a környezeti hatásaikat alaposan meg kell vizsgálni. A gyártás során felhasznált anyagok, az akkumulátorok élettartama és újrahasznosíthatósága, valamint a repülés során kibocsátott zaj (még ha alacsonyabb is) mind figyelembe veendő tényezők. A természetes élőhelyeken történő alkalmazásuk során biztosítani kell, hogy ne zavarják meg a vadon élő állatokat, és ne járuljanak hozzá a fényszennyezéshez vagy egyéb környezeti terhelésekhez.
Biztonság és szabályozás
Az ornitopterek, különösen a nagyobb, emberes változatok, biztonsági szempontból is kihívást jelentenek. A mechanikai komplexitás, a szárnycsapások dinamikája és a vezérlőrendszerek hibalehetőségei mind kockázatot jelentenek. A légtérben való közlekedésük szabályozása is komplex feladat, különösen, ha autonóm módon működnek. Szükségesek olyan szabványok és előírások, amelyek garantálják az ornitopterek biztonságos üzemeltetését, elkerülve a baleseteket és az esetleges károkat.
Az ornitopterek fejlesztése tehát nem csupán mérnöki, hanem társadalmi felelősséget is hordoz magában. A technológia előnyeinek kiaknázása mellett folyamatosan figyelemmel kell kísérni és kezelni kell a felmerülő etikai dilemmákat és a lehetséges negatív hatásokat, hogy a szárnycsapásos repülés jövője valóban az emberiség javát szolgálja.
Gyakran ismételt kérdések az ornitopterekről

Az ornitopterekkel kapcsolatban számos kérdés merül fel az emberekben, tekintettel egyedi működésükre és a hagyományos repülőeszközöktől való eltérésükre. Összegyűjtöttünk néhányat a leggyakoribb kérdések közül.
Mi a különbség egy ornitopter és egy drón között?
A legfőbb különbség a repülési elvben rejlik. Az ornitopterek a szárnycsapásos repülést utánozzák, akárcsak a madarak vagy rovarok. A szárnyak dinamikus mozgása generálja a felhajtóerőt és a tolóerőt. Ezzel szemben a drónok (különösen a multirotor elrendezésűek) fix fordulatszámú propellerekkel repülnek, amelyek a forgásukkal generálják a felhajtóerőt és a tolóerőt, a vezérlést pedig a propellerek fordulatszámának változtatásával érik el. Az ornitopterek gyakran csendesebbek és nehezebben észrevehetők, mint a drónok, ami előnyt jelenthet bizonyos alkalmazásoknál.
Miért nem látunk még ornitoptereket a mindennapi életben?
Az ornitopterek még nem terjedtek el széles körben, mert a fejlesztésük rendkívül komplex és költséges. Mechanikailag sokkal bonyolultabbak, mint a merevszárnyú repülőgépek vagy a drónok, és a vezérlésük is nagyobb kihívást jelent. Jelenleg a merevszárnyúak és a helikopterek hatékonyabbak a sebesség, a teherbírás és a hatótávolság szempontjából, míg a drónok olcsóbb és egyszerűbb alternatívát kínálnak a helyben lebegéshez és a függőleges fel- és leszálláshoz. Az ornitopterek a kutatás és a speciális niche alkalmazások területén vannak jelen.
Lehetséges emberes ornitoptert építeni?
Elméletileg igen, és már voltak is sikeres, bár rövid ideig tartó kísérletek. A Toronto Egyetem Snowbird ornitoptere például emberi erővel hajtva repült néhány másodpercig. Azonban egy ember szállítására alkalmas ornitopter megépítése rendkívül nagy kihívás a szükséges energia, a szerkezeti súly és a stabilitás szempontjából. Jelenleg a technológia nem teszi lehetővé a praktikus, hosszabb távú emberes ornitopter repülést.
Milyen anyagokból készülnek az ornitopterek?
Az ornitopterek építéséhez könnyű, de erős és rugalmas anyagokat használnak. A vázszerkezet gyakran szénszálas kompozitokból, üvegszálból, balsafából vagy könnyű alumíniumötvözetekből készül. A szárnyak anyaga általában vékony, rugalmas fólia vagy szövet, például Mylar, Kapton, szilikon alapú polimerek, vagy speciálisan kezelt textíliák. A mechanikai alkatrészek (fogaskerekek, karok) készülhetnek fémből vagy nagy szilárdságú műanyagokból.
Milyen jövő vár az ornitopterekre?
Az ornitopterek jövője ígéretes, különösen a mikro-ornitopterek (MAV-ok) és a speciális alkalmazások terén. A folyamatos kutatás az anyagtudományban, az energiahatékonyságban, a mesterséges intelligenciában és a bionikus tervezésben segíthet leküzdeni a jelenlegi korlátokat. Valószínűleg a felderítés, megfigyelés, környezeti monitoring és bolygóközi felderítés terén fognak először szélesebb körben elterjedni, ahol egyedülálló képességeik valódi előnyt jelentenek. A mindennapi utazásban valószínűleg nem fognak versenyezni a hagyományos repülőeszközökkel, de kiegészítő szerepük jelentős lehet.
Az ornitopter tehát nem csupán egy technikai eszköz, hanem az emberi találékonyság, a kitartás és a természet iránti tisztelet szimbóluma. A szárnycsapásos repülés ősi álma továbbra is inspirálja a mérnököket és tudósokat, hogy megfejtsék a madarak és rovarok titkait, és egy nap talán mi magunk is a levegőben táncolhatunk, ahogy azt évezredek óta elképzeljük. A jövő ornitopterei valószínűleg sokkal csendesebbek, hatékonyabbak és autonómabbak lesznek, mint valaha, új lehetőségeket nyitva meg a repülés és a felfedezés területén. Ahogy a technológia fejlődik, úgy válik egyre valóságosabbá az a vízió, hogy a mechanikus madarak is szárnyra kapnak az égbolton, megvalósítva Leonardo da Vinci és számtalan más feltaláló évszázados álmát.







